无人驾驶的车辆动力学模型验证:探索自动驾驶的核心基石
无人驾驶的车辆动力学模型验证。 配套详细视频讲解。 配套无人驾驶车辆模型预测控制资料,有视频讲解carsim2019,matlab2018
在无人驾驶领域,车辆动力学模型验证是一个关键环节,它就如同建筑的地基,为整个自动驾驶系统的可靠性与安全性奠定基础。今天咱就深入唠唠这无人驾驶的车辆动力学模型验证。
为啥车辆动力学模型验证这么重要
无人驾驶车辆在复杂的道路环境中行驶,要实现精准的操控和安全行驶,必须依赖准确的车辆动力学模型。这个模型描述了车辆在各种力和力矩作用下的运动状态,比如加速、减速、转向时车辆如何响应。如果模型不准确,那自动驾驶系统做出的决策可能就会南辕北辙,导致危险情况发生。
验证过程中的关键要素
- 模型建立:常见的车辆动力学模型有单车模型(Bicycle Model),以简单的两轮模型来近似描述车辆的运动。下面用Python代码简单实现一个单车模型的运动学部分(仅为示例简化版):
import numpy as np
import matplotlib.pyplot as plt
def bicycle_model(x, y, theta, v, delta, L, dt):
# x, y 为车辆位置,theta为车辆航向角,v为车速,delta为前轮转向角,L为轴距,dt为时间步长
x_dot = v * np.cos(theta)
y_dot = v * np.sin(theta)
theta_dot = v / L * np.tan(delta)
x = x + x_dot * dt
y = y + y_dot * dt
theta = theta + theta_dot * dt
return x, y, theta
# 初始化参数
x0, y0, theta0 = 0, 0, 0
v = 5 # m/s
delta = np.pi / 12 # 前轮转向角
L = 2.5 # 轴距
dt = 0.1 # 时间步长
t = np.arange(0, 10, dt)
x_list, y_list, theta_list = [], [], []
for _ in t:
x0, y0, theta0 = bicycle_model(x0, y0, theta0, v, delta, L, dt)
x_list.append(x0)
y_list.append(y0)
theta_list.append(theta0)
plt.plot(x_list, y_list)
plt.xlabel('X position (m)')
plt.ylabel('Y position (m)')
plt.title('Bicycle Model Trajectory')
plt.grid(True)
plt.show()在这段代码里,bicycle_model 函数通过给定的初始位置 (x, y)、航向角 theta、车速 v、前轮转向角 delta 和轴距 L 以及时间步长 dt,来更新车辆下一时刻的位置和航向角。通过循环模拟一段时间内车辆的运动轨迹,并最终绘制出来。
- 数据采集:实际验证中,需要从真实车辆上采集大量的数据,包括车速、转向角度、加速度等。这些数据是验证模型准确性的重要依据。比如利用传感器获取的数据可能长这样(伪代码表示数据格式):
# 假设这是从传感器获取的数据
data = [
{'time': 0, 'speed': 10, 'steering_angle': 0.1, 'acceleration': 0},
{'time': 0.1, 'speed': 10.2, 'steering_angle': 0.12, 'acceleration': 0.2},
# 更多时间步的数据...
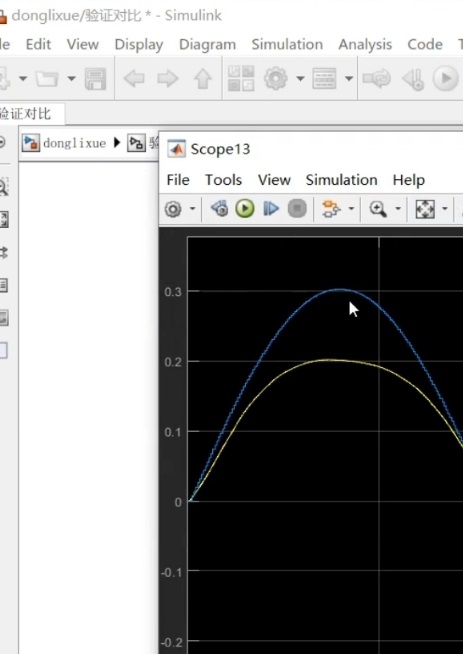
]- 模型验证方法:将采集到的数据输入到建立好的车辆动力学模型中,对比模型输出和实际测量值。可以使用误差分析方法,比如均方根误差(RMSE)来量化模型的准确性。下面用Python代码计算RMSE:
import numpy as np
def calculate_rmse(measured, predicted):
return np.sqrt(np.mean((np.array(measured) - np.array(predicted)) ** 2))
# 假设这是实际测量的车速
measured_speed = [10, 10.2, 10.5, 10.3]
# 假设这是模型预测的车速
predicted_speed = [9.8, 10.1, 10.4, 10.2]
rmse = calculate_rmse(measured_speed, predicted_speed)
print(f'RMSE: {rmse}')这里的 calculate_rmse 函数通过计算测量值和预测值差值的平方的均值的平方根,来得出RMSE。RMSE越小,说明模型预测值与实际测量值越接近,模型越准确。
配套资料介绍
- 视频讲解:本次分享配套了详细的视频讲解,能让你更直观地理解整个车辆动力学模型验证过程。视频里会一步步剖析模型建立、数据采集以及验证方法等各个环节,无论是新手小白还是有一定基础的开发者,都能从中获取到有价值的信息。
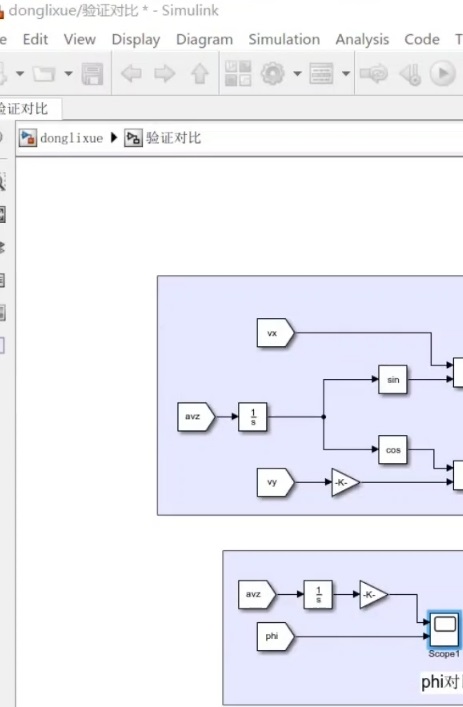
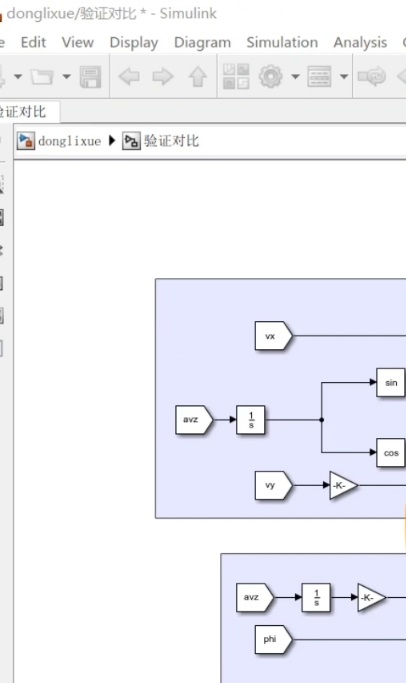
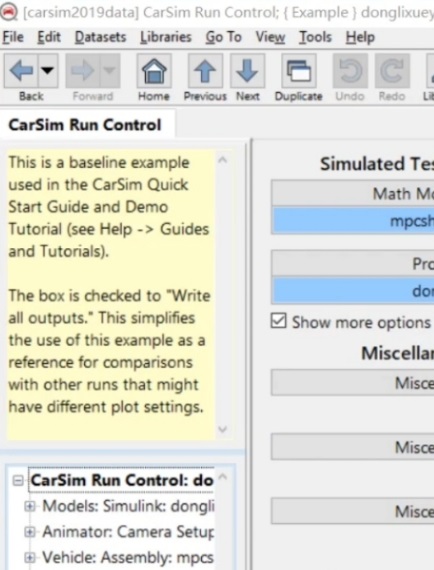
- 无人驾驶车辆模型预测控制资料:还准备了关于无人驾驶车辆模型预测控制的资料,其中包括carsim2019和matlab2018的视频讲解。Carsim是一款专业的车辆动力学仿真软件,Matlab则是强大的数值计算和编程工具。通过结合这两款软件,能更高效地进行车辆动力学模型的搭建、仿真以及验证。在carsim2019中可以构建高度逼真的车辆模型和行驶环境,Matlab2018则能对采集的数据进行深度分析和处理,两者相辅相成,助力你在无人驾驶车辆动力学模型验证的道路上畅通无阻。
无人驾驶的车辆动力学模型验证虽然复杂,但只要我们掌握好方法,借助合适的工具和资料,就能逐步攻克这一关键技术点,为无人驾驶的发展添砖加瓦。希望大家通过这些配套资料,能在这个领域有更深入的探索和收获。
无人驾驶的车辆动力学模型验证。 配套详细视频讲解。 配套无人驾驶车辆模型预测控制资料,有视频讲解carsim2019,matlab2018

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 0
0 0
0- 0



 已为社区贡献27条内容
已为社区贡献27条内容

所有评论(0)