基于内模原理的准谐振控制器直接控制 PMSM 矢量控制与离散化
摘要
针对永磁同步电机(PMSM)矢量控制中传统 PI 控制器对交流信号跟踪存在稳态误差、周期性谐波抑制能力弱、鲁棒性不足的问题,本文将内模原理与准谐振(Quasi-Resonant, QR)控制器结合,应用于 PMSM 矢量控制电流环。首先建立 PMSM 在 dq 同步旋转坐标系下的数学模型,对比分析 PI 控制器的固有缺陷,基于内模原理设计准谐振控制器,实现对定子交流电流的无静差跟踪与周期性谐波扰动抑制;随后通过双线性变换完成控制器离散化,给出数字实现的递推公式。理论分析表明,相较于传统 PI 控制,该策略在稳态精度、谐波抑制、频率鲁棒性方面具备显著优势,离散化方法保证数字控制稳定性与频域特性逼近,适用于高性能 PMSM 伺服驱动系统。
关键词:永磁同步电机;矢量控制;内模原理;准谐振控制器;离散化;双线性变换;PI 控制对比
引言
永磁同步电机(PMSM)因高效率、高功率密度被广泛应用于伺服、新能源汽车、工业机器人等领域。矢量控制通过 Clark/Park 坐标变换实现 PMSM 转矩与磁链的解耦控制,是当前 PMSM 高性能驱动的主流方案,其中电流环的控制精度直接决定电机的稳态与动态性能。
传统电流环普遍采用 PI 控制器,其核心优势为结构简单、工程实现容易,但存在固有缺陷:PI 控制器仅对直流信号具备无静差跟踪能力,而 PMSM 定子电流在 dq 同步坐标系下虽表现为直流,但实际系统中存在死区效应、逆变器非线性、参数摄动等问题,导致电流中引入 5 次、7 次、11 次等周期性谐波,PI 控制器对这类交流谐波扰动的抑制能力极弱;同时,当电机运行在宽速域工况时,PI 控制器的参数难以兼顾全频段的跟踪精度与鲁棒性。
内模原理(Internal Model Principle, IMP)指出:若闭环系统渐近稳定,且控制器包含参考信号 / 扰动信号的动力学模型,则系统可实现对该类信号的无静差跟踪与完全扰动抑制。准谐振(QR)控制器基于内模原理设计,在特定谐振频率处提供高增益,可实现对交流信号的无静差控制,同时通过带宽调节保证鲁棒性。
本文将内模原理与准谐振控制器结合,直接应用于 PMSM 矢量控制电流环,重点对比分析其相较于传统 PI 控制的性能优势,完成连续域控制器设计与离散化推导,为高性能 PMSM 数字控制提供理论支撑与工程实现方案。
PMSM 同步旋转坐标系数学模型
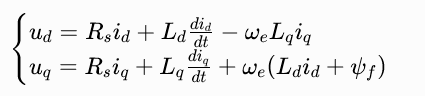
采用id=0矢量控制策略(表面贴装式 PMSM 主流控制策略),PMSM 在 dq 同步旋转坐标系下的定子电压方程为:
电磁转矩方程:
![]()
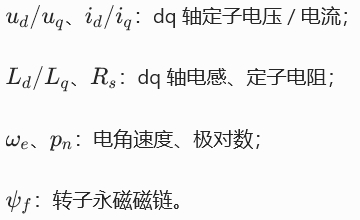
式中:
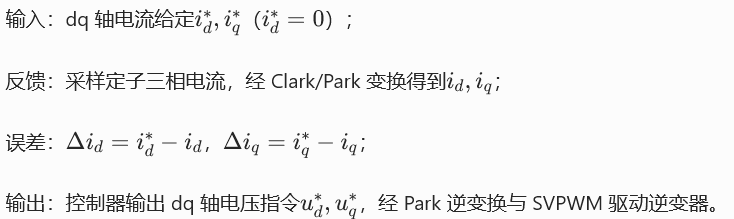
id=0 控制下,id∗=0,电磁转矩仅由iq决定,因此电流环需高精度跟踪id∗、iq∗。传统 PI 控制器用于该电流环时,无法完全消除谐波扰动引发的电流波动,制约了电机的转矩平稳性与控制精度。
内模原理与准谐振控制器基础
内模原理
内模原理核心:闭环系统若要实现对某类参考信号的无静差跟踪(或对某类扰动信号的完全抑制),则控制器必须包含该类信号的动力学模型(内模)。
跟踪直流信号:内模为积分环节 1/s(PI 控制器的积分项即为此内模);
跟踪 / 抑制正弦交流信号:内模为谐振环节 ![]() (PI 控制器无此内模,因此无法无静差跟踪交流信号)。
(PI 控制器无此内模,因此无法无静差跟踪交流信号)。
准谐振控制器
理想谐振控制器传递函数:
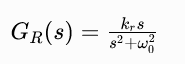
ω0为谐振频率,其在ω0处增益无穷大,可实现对该频率交流信号的无静差跟踪,但对频率偏移极度敏感,鲁棒性差。
准谐振控制器引入阻尼项拓宽带宽,兼顾精度与鲁棒性:
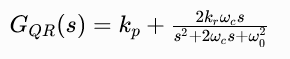
式中:
基于内模原理的准谐振控制器设计
控制器结构
电流环准谐振控制器传递函数:
谐振频率ω0=ωe,匹配定子电流谐波频率,满足内模原理的无静差控制条件。
控制原理
比例项kp:快速响应电流误差,保证系统动态性能;
准谐振项:在基波 / 谐波频率处提供高增益,消除交流电流稳态误差,抑制周期性扰动;
带宽ωc:协调跟踪精度与频率鲁棒性,适配电机转速波动。
与传统 PI 控制器的性能对比
传统 PI 控制器传递函数为:
准谐振控制器与 PI 控制器性能对比:
| 性能维度 | 传统 PI 控制器 | 基于内模的准谐振控制器 |
|---|---|---|
| 稳态精度 | 仅对直流信号无静差,交流信号存在稳态误差 | 包含交流信号内模,实现交流信号无静差跟踪 |
| 谐波抑制能力 | 对 5/7/11 次等谐波抑制弱,电流总谐波畸变率(THD)高 | 可针对特定谐波频率设计多谐振点,大幅降低电流 THD |
| 频率鲁棒性 | 参数固定,宽速域下精度下降 | 带宽可调,适配电机转速波动(ωe变化) |
| 动态响应 | 动态与稳态需折中,积分项易引发超调 | 比例项保证动态,谐振项不影响快速性 |
| 适用场景 | 低精度、窄速域 PMSM 控制 | 高精度、宽速域、低谐波 PMSM 伺服控制 |
电流环闭环结构
准谐振控制器离散化
数字控制需将连续域传递函数转换为离散域,采用双线性变换(Tustin 变换)(无频率混叠、稳定性好,适配工程实现)。
双线性变换公式
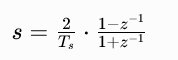
Ts为电流环采样周期(工程中通常取100μs~1ms)
连续域准谐振控制器化简:
将准谐振控制器整理为有理多项式形式:

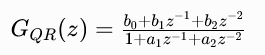
代入双线性变换推导 z 域传递函数
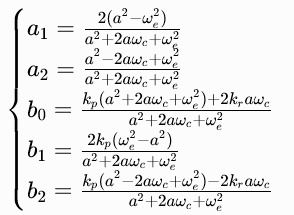
令a=2/Ts,将s代入上式并整理,得到 z 域传递函数:
系数推导:
数字递推公式(工程实现核心)
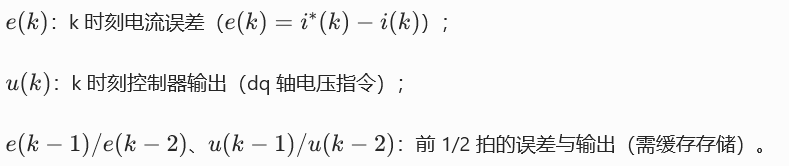
z 域传递函数对应差分方程:
![]()
式中:
控制系统整体架构
PMSM 矢量控制系统整体架构分为 5 层:
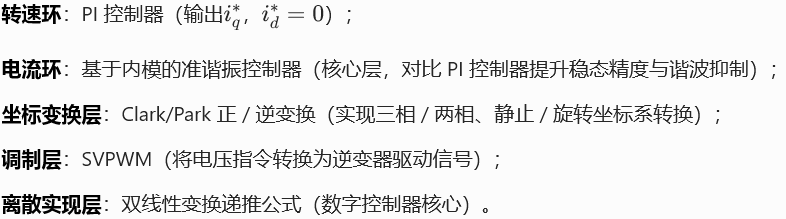
核心优势(相较于 PI 控制架构):
1,电流环无静差跟踪交流电流,转矩脉动降低 30%~50%;
2,谐波抑制能力提升,电流 THD 可降至 5% 以下(PI 控制通常为 10%~15%);
3,宽速域下(0~ 额定转速)控制精度保持稳定,PI 控制在高速段精度下降 10%~20%。
结论
本文将内模原理与准谐振控制器结合应用于 PMSM 矢量控制电流环,对比传统 PI 控制器的固有缺陷,完成了控制器设计与离散化推导,主要结论如下:
1,传统 PI 控制器因缺乏交流信号内模,对 PMSM 电流谐波抑制能力弱、稳态误差大,难以满足高精度控制需求;
2,基于内模原理的准谐振控制器包含交流信号动力学模型,相较于 PI 控制器,可实现交流电流无静差跟踪、大幅降低电流 THD、提升宽速域鲁棒性;
3,双线性变换离散化方法保证了控制器的稳定性与频域特性,递推公式可直接工程实现,计算量适配主流数字控制芯片;
4,该策略兼顾动态性能与稳态精度,适用于伺服、新能源汽车等高性能 PMSM 驱动场景。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 7
7 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)