Friendly ARM开发板安装Linux系统教程
友善之臂ARM9开发板安装Linux系统教程
前言:智能蘑菇房项目的运行环境是友善之臂ARM9开发板,所以需要在上面灌一个linux系统,下面我来简单介绍一下。
准备
- 读卡器
- SD卡
- 串口线一根(USB转串口也可以)
- Friendly ARM开发板
SuperBoot烧写
BootLoader:在嵌入式操作系统中,BootLoader是在操作系统内核运行之前运行。可以初始化硬件设备、建立内存空间映射图,从而将系统的软硬件环境带到一个合适状态,以便为最终调用操作系统内核准备好正确的环境。也可看作是嵌入式系统的BIOS。
SuperBoot是由友善之臂研发的,专供企业大批量生产的bootloader。
-
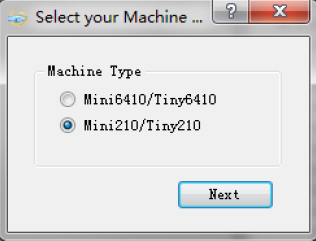
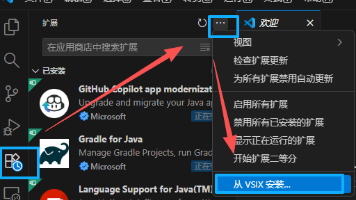
打开光盘中的SD-flasher软件(尽量使用管理员权限)。选择Mini210/Tiny210这个选项。
-
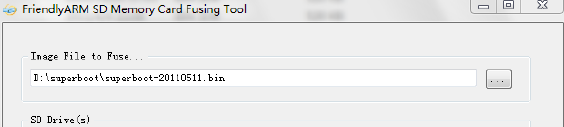
选择你要烧写的SuperBoot。(不要使用中文目录)
-
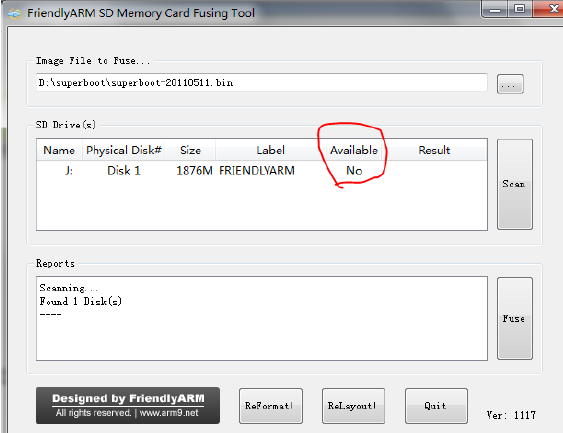
插入装有SD卡的读卡器(关闭写模式), 点击scan来扫描你的SD卡。(此时不可烧写)
-
点击Relayout重新分割你的SD卡。分割完成后重新点击scan扫描你的SD卡,SD卡变为可烧写。
-
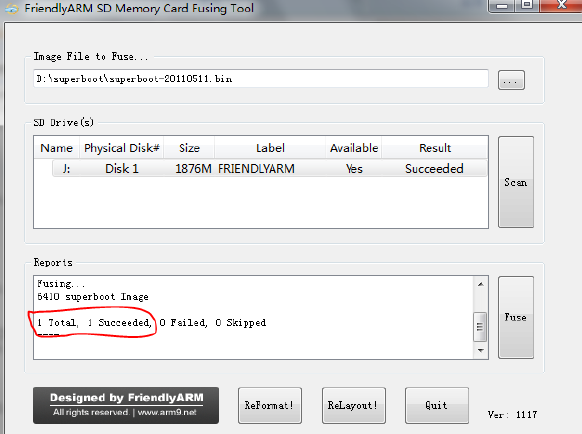
点击fuse就可以烧写系统了,成功的话会提示success。
-
检测:把SD卡插到开发板上,并把开发板上S2开关设置为“SDBOOT”模式。开机后,如果看到板上的LED1在不停的闪烁,这就说明Superboot已经正常运行了。
配置文件
我们需要将光盘中的配置文件FriendlyARM.ini做如下修改,就可以安装了,如果你还有什么其它配置,那么请查阅光盘中的datasheet,根据各个参数的具体意义,自行配置。
#This line cannot be removed. by FriendlyARM(www.arm9.net)
CheckOneButton=NoAction = Install
OS = Linux
LCD-Mode = No
LCD-Type = S70
LowFormat = NoVerifyNandWrite = NoCheckCRC32=No
StatusType = Beeper | LED
################### Linux ####################Linux-BootLoader = Superboot210.bin
Linux-Kernel = Linux/zImage
Linux-CommandLine = root=/dev/mtdblock4 rootfstype=yaffs2 console=ttySAC0,115200 init=/linuxrc skipcali=yes ctp=2Linux-RootFs-InstallImage = Linux/rootfs_qtopia_qt4.img安装
首先需要保证你已经将光盘中提供的Linux系统image写入SD卡。
然后,将SD卡放入开发板中,把开发板上S2开关设置为“SDBOOT”模式。然后开机就会自己进行安装。安装后直接进入系统。
总结
做嵌入式项目,硬件与开发环境的选择往往是至关重要的,所以写这一篇来纪念我第一次做这件事。希望能帮助到您。
反馈与建议
- 微博:@AnSwEr不是答案
- github:AnSwErYWJ
- 博客:AnSwEr不是答案的专栏

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 1
1 0
0- 0



 已为社区贡献8条内容
已为社区贡献8条内容

所有评论(0)