android启动--深入理解init进程
linux-dash
A beautiful web dashboard for Linux
项目地址:https://gitcode.com/gh_mirrors/li/linux-dash
·
init是一个进程,它是linux系统中用户空间的第一个进程,其进程PID是1,父进程为linux
系统内核的0号进程。所以其被赋予很多极其重要的职责,linux内核初始化完成后就开始执行它。
代码路径:\system\core\init\init.c
下面就分析一下先吧,只分析重点的函数功能:
int main(int argc, char **argv)
act.sa_flags = SA_NOCLDSTOP;
act.sa_mask = 0;
act.sa_restorer = NULL;
sigaction(SIGCHLD, &act, 0);
// 2、创建文件夹,并挂载设备
mkdir("/dev", 0755);
mkdir("/proc", 0755);
....
open_devnull_stdio();
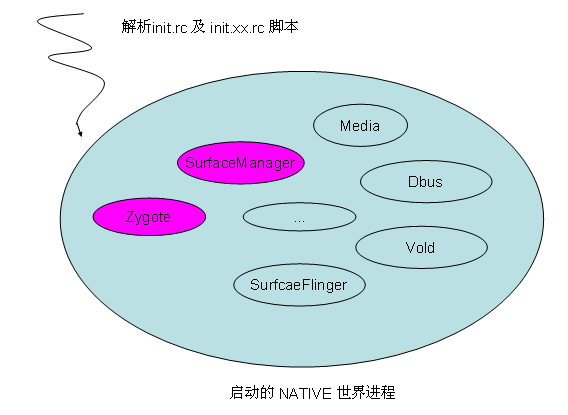
// 4、解析 init.rc 脚本
parse_config_file("/init.rc");
// 5、解析机器相关的配置文件,一般相关的放在init.rc中利用service action调过去
snprintf(tmp, sizeof(tmp), "/init.%s.rc", hardware);
parse_config_file(tmp);
// 6、建立 uevent,用于与linux kernel交互的socket
device_fd = device_init();
// 7、初始化及加载属性相关资源,这里利用ashmem共享,属于整个系统的资源
property_init();
// 8、执行 on init 、early-boot 及 boot 片段动作,这些定义于 init.rc 中
/* execute all the boot actions to get us started */
action_for_each_trigger("init", action_add_queue_tail);
drain_action_queue();
/* execute all the boot actions to get us started */
action_for_each_trigger("early-boot", action_add_queue_tail);
action_for_each_trigger("boot", action_add_queue_tail);
// 9、这里定义的init进程需要关注的四个方面事情
ufds[0].fd = device_fd;
ufds[0].events = POLLIN; // Uevent事件
ufds[1].fd = property_set_fd;
ufds[1].events = POLLIN; // 属性事件
ufds[2].fd = signal_recv_fd;
ufds[2].events = POLLIN; // 子进程事件
fd_count = 3;
ufds[3].fd = keychord_fd;
ufds[3].events = POLLIN; // keychord热键事件
fd_count++;
// ok, 下面就是init进程的处理循环
for(;;) {
// I、执行init.rc 脚本中的动作
drain_action_queue();
// II、执行标志为SVC_RESTARTING的进程,利用fork+execve启动新的进程
restart_processes();
if (nr <= 0)
continue;
/* we got a SIGCHLD - reap and restart as needed */
read(signal_recv_fd, tmp, sizeof(tmp));
while (!wait_for_one_process(0))
;
continue;
}
if (ufds[0].revents == POLLIN)
handle_device_fd(device_fd);
if (ufds[1].revents == POLLIN)
handle_property_set_fd(property_set_fd);
if (ufds[3].revents == POLLIN)
handle_keychord(keychord_fd);
这里我们重点关注一下service的解析过程:
这里以启动 zygote 为例讲解一下:
service zygote /system/bin/app_process -Xzygote /system/bin --zygote --start-system-server
socket zygote stream 666 //创建一个stream流式套接字
onrestart write /sys/android_power/request_state wake
onrestart write /sys/power/state on
onrestart restart media
服务名称: zygote
进程路径: /system/bin/app_process
进程启动参数:-Xzygote /system/bin --zygote --start-system-server
解析入口函数:parse_new_section
void parse_new_section(struct parse_state *state, int kw,
int nargs, char **args)
{
switch(kw) {
case K_service:
state->context = parse_service(state, nargs, args);
if (state->context) {
state->parse_line = parse_line_service;
return;
}
break;
...
}
--> 其中所有的解析的service放在如下双链表结构中
struct service {
/* list of all services */
struct listnode slist;
const char *name;
const char *classname; //所属class名字,默认为"default"
unsigned flags;
pid_t pid;
struct socketinfo *sockets;
struct svcenvinfo *envvars;
struct action onrestart; /* Actions to execute on restart. */
...
};
static void *parse_service(struct parse_state *state, int nargs, char **args)
{
struct service *svc;
svc = service_find_by_name(args[1]);
svc->name = args[1];
svc->classname = "default";
memcpy(svc->args, args + 2, sizeof(char*) * nargs);
svc->args[nargs] = 0;
svc->nargs = nargs;
svc->onrestart.name = "onrestart";
list_init(&svc->onrestart.commands);
// 加入到全局 service_list 链表中
list_add_tail(&service_list, &svc->slist);
return svc;
}
然后执行点都使用 list_for_each(node, &service_list) 循环遍历所有服务及执行动作
service 启动:
在解析 init.rc 脚本中
class_start default
这个class_start 是一个COMMAND,其对应的函数是 do_class_start ,注意类似的COMMAND也一样
do_class_start()
-->service_start_if_not_disabled()
--> service_start(svc, NULL);
void service_start(struct service *svc, const char *dynamic_args)
{
// 已经运行则直接返回
if (svc->flags & SVC_RUNNING) {
return;
}
NOTICE("starting '%s'\n", svc->name);
pid = fork(); //创建子进程
if(pid == 0){
// 运行于子进程中
// 准备好执行环境
add_environment(ei->name, ei->value);
create_socket(si->name,
!strcmp(si->type, "dgram") ?
SOCK_DGRAM : SOCK_STREAM,
si->perm, si->uid, si->gid);
// 开始执行具体的进程
execve(svc->args[0], (char**) arg_ptrs, (char**) ENV);
}
svc->time_started = gettime();
svc->pid = pid;
svc->flags |= SVC_RUNNING;
notify_service_state(svc->name, "running");
}
onrestart 用于重启使用,这就是最开始那个 sigchld_handler 函数:
static void sigchld_handler(int s)
{
write(signal_fd, &s, 1); // 写数据
}
读取数据处理:
在 init 进程的main函数中处理:
if (ufds[2].revents == POLLIN) {
/* we got a SIGCHLD - reap and restart as needed */
read(signal_recv_fd, tmp, sizeof(tmp));
while (!wait_for_one_process(0))
;
continue;
}
-->
static int wait_for_one_process(int block)
{
while ( (pid = waitpid(-1, &status, block ? 0 : WNOHANG)) == -1 && errno == EINTR );
// 杀死zygote创建的所有子进程,这就是zygote 死则整个系统崩溃的原因了
if (!(svc->flags & SVC_ONESHOT)) {
kill(-pid, SIGKILL);
NOTICE("process '%s' killing any children in process group\n", svc->name);
}
//超时及重启次数系统重启进入recovery模式
if (svc->flags & SVC_CRITICAL) {
if (svc->time_crashed + CRITICAL_CRASH_WINDOW >= now) {
if (++svc->nr_crashed > CRITICAL_CRASH_THRESHOLD) {
ERROR("critical process '%s' exited %d times in %d minutes; "
"rebooting into recovery mode\n", svc->name,
CRITICAL_CRASH_THRESHOLD, CRITICAL_CRASH_WINDOW / 60);
sync();
__reboot(LINUX_REBOOT_MAGIC1, LINUX_REBOOT_MAGIC2,
LINUX_REBOOT_CMD_RESTART2, "recovery");
return 0;
}
}
...
系统内核的0号进程。所以其被赋予很多极其重要的职责,linux内核初始化完成后就开始执行它。
代码路径:\system\core\init\init.c
下面就分析一下先吧,只分析重点的函数功能:
int main(int argc, char **argv)
{
// 1、设置子进程退出的信号处理函数:sigchld_handler
act.sa_handler = sigchld_handler;act.sa_flags = SA_NOCLDSTOP;
act.sa_mask = 0;
act.sa_restorer = NULL;
sigaction(SIGCHLD, &act, 0);
// 2、创建文件夹,并挂载设备
mkdir("/dev", 0755);
mkdir("/proc", 0755);
....
/* clear the umask */
umask(0); // 其实也就是 chmod 777 赋予所有权限
open_devnull_stdio();
// 4、解析 init.rc 脚本
parse_config_file("/init.rc");
// 5、解析机器相关的配置文件,一般相关的放在init.rc中利用service action调过去
snprintf(tmp, sizeof(tmp), "/init.%s.rc", hardware);
parse_config_file(tmp);
// 6、建立 uevent,用于与linux kernel交互的socket
device_fd = device_init();
// 7、初始化及加载属性相关资源,这里利用ashmem共享,属于整个系统的资源
property_init();
// 8、执行 on init 、early-boot 及 boot 片段动作,这些定义于 init.rc 中
/* execute all the boot actions to get us started */
action_for_each_trigger("init", action_add_queue_tail);
drain_action_queue();
/* execute all the boot actions to get us started */
action_for_each_trigger("early-boot", action_add_queue_tail);
action_for_each_trigger("boot", action_add_queue_tail);
// 9、这里定义的init进程需要关注的四个方面事情
ufds[0].fd = device_fd;
ufds[0].events = POLLIN; // Uevent事件
ufds[1].fd = property_set_fd;
ufds[1].events = POLLIN; // 属性事件
ufds[2].fd = signal_recv_fd;
ufds[2].events = POLLIN; // 子进程事件
fd_count = 3;
ufds[3].fd = keychord_fd;
ufds[3].events = POLLIN; // keychord热键事件
fd_count++;
// ok, 下面就是init进程的处理循环
for(;;) {
// I、执行init.rc 脚本中的动作
drain_action_queue();
// II、执行标志为SVC_RESTARTING的进程,利用fork+execve启动新的进程
restart_processes();
// III、调用poll轮询上述的四个事件nr = poll(ufds, fd_count, timeout);
if (nr <= 0)
continue;
// IV、依次处理各个事件if (ufds[2].revents == POLLIN) {
/* we got a SIGCHLD - reap and restart as needed */
read(signal_recv_fd, tmp, sizeof(tmp));
while (!wait_for_one_process(0))
;
continue;
}
if (ufds[0].revents == POLLIN)
handle_device_fd(device_fd);
if (ufds[1].revents == POLLIN)
handle_property_set_fd(property_set_fd);
if (ufds[3].revents == POLLIN)
handle_keychord(keychord_fd);
...
}
return 0;}
这里我们重点关注一下service的解析过程:
这里以启动 zygote 为例讲解一下:
service zygote /system/bin/app_process -Xzygote /system/bin --zygote --start-system-server
socket zygote stream 666 //创建一个stream流式套接字
onrestart write /sys/android_power/request_state wake
onrestart write /sys/power/state on
onrestart restart media
服务名称: zygote
进程路径: /system/bin/app_process
进程启动参数:-Xzygote /system/bin --zygote --start-system-server
解析入口函数:parse_new_section
void parse_new_section(struct parse_state *state, int kw,
int nargs, char **args)
{
switch(kw) {
case K_service:
state->context = parse_service(state, nargs, args);
if (state->context) {
state->parse_line = parse_line_service;
return;
}
break;
...
}
--> 其中所有的解析的service放在如下双链表结构中
struct service {
/* list of all services */
struct listnode slist;
const char *name;
const char *classname; //所属class名字,默认为"default"
unsigned flags;
pid_t pid;
struct socketinfo *sockets;
struct svcenvinfo *envvars;
struct action onrestart; /* Actions to execute on restart. */
...
};
static void *parse_service(struct parse_state *state, int nargs, char **args)
{
struct service *svc;
svc = service_find_by_name(args[1]);
svc->name = args[1];
svc->classname = "default";
memcpy(svc->args, args + 2, sizeof(char*) * nargs);
svc->args[nargs] = 0;
svc->nargs = nargs;
svc->onrestart.name = "onrestart";
list_init(&svc->onrestart.commands);
// 加入到全局 service_list 链表中
list_add_tail(&service_list, &svc->slist);
return svc;
}
然后执行点都使用 list_for_each(node, &service_list) 循环遍历所有服务及执行动作
service 启动:
在解析 init.rc 脚本中
class_start default
这个class_start 是一个COMMAND,其对应的函数是 do_class_start ,注意类似的COMMAND也一样
加上前缀 do_xxx 即函数名称: 其实在文件 /system/core/init/keywords.h 头文件中定义了对应关系,由宏定义:
#define KEYWORD(symbol, flags, nargs, func) K_##symbol,
KEYWORD(chdir, COMMAND, 1, do_chdir)
KEYWORD(chroot, COMMAND, 1, do_chroot)
ex: mount 对应于 do_mount
代码:/system/core/init/builtins.cdo_class_start()
-->service_start_if_not_disabled()
--> service_start(svc, NULL);
void service_start(struct service *svc, const char *dynamic_args)
{
// 已经运行则直接返回
if (svc->flags & SVC_RUNNING) {
return;
}
NOTICE("starting '%s'\n", svc->name);
pid = fork(); //创建子进程
if(pid == 0){
// 运行于子进程中
// 准备好执行环境
add_environment(ei->name, ei->value);
create_socket(si->name,
!strcmp(si->type, "dgram") ?
SOCK_DGRAM : SOCK_STREAM,
si->perm, si->uid, si->gid);
// 开始执行具体的进程
execve(svc->args[0], (char**) arg_ptrs, (char**) ENV);
}
svc->time_started = gettime();
svc->pid = pid;
svc->flags |= SVC_RUNNING;
notify_service_state(svc->name, "running");
}
onrestart 用于重启使用,这就是最开始那个 sigchld_handler 函数:
static void sigchld_handler(int s)
{
write(signal_fd, &s, 1); // 写数据
}
读取数据处理:
在 init 进程的main函数中处理:
if (ufds[2].revents == POLLIN) {
/* we got a SIGCHLD - reap and restart as needed */
read(signal_recv_fd, tmp, sizeof(tmp));
while (!wait_for_one_process(0))
;
continue;
}
-->
static int wait_for_one_process(int block)
{
while ( (pid = waitpid(-1, &status, block ? 0 : WNOHANG)) == -1 && errno == EINTR );
// 杀死zygote创建的所有子进程,这就是zygote 死则整个系统崩溃的原因了
if (!(svc->flags & SVC_ONESHOT)) {
kill(-pid, SIGKILL);
NOTICE("process '%s' killing any children in process group\n", svc->name);
}
//超时及重启次数系统重启进入recovery模式
if (svc->flags & SVC_CRITICAL) {
if (svc->time_crashed + CRITICAL_CRASH_WINDOW >= now) {
if (++svc->nr_crashed > CRITICAL_CRASH_THRESHOLD) {
ERROR("critical process '%s' exited %d times in %d minutes; "
"rebooting into recovery mode\n", svc->name,
CRITICAL_CRASH_THRESHOLD, CRITICAL_CRASH_WINDOW / 60);
sync();
__reboot(LINUX_REBOOT_MAGIC1, LINUX_REBOOT_MAGIC2,
LINUX_REBOOT_CMD_RESTART2, "recovery");
return 0;
}
}
...
}
总结一下,整个init 进程启动后,基本的NATIVE 世界如下:
A beautiful web dashboard for Linux
最近提交(Master分支:4 个月前 )
186a802e
added ecosystem file for PM2 5 年前
5def40a3
Add host customization support for the NodeJS version 5 年前

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 5
5 0
0- 0



 已为社区贡献10条内容
已为社区贡献10条内容

所有评论(0)