
RTL8201 移植
linux-dash
A beautiful web dashboard for Linux
项目地址:https://gitcode.com/gh_mirrors/li/linux-dash
·
硬件平台:NUC977
软件平台:linux-3.10.101
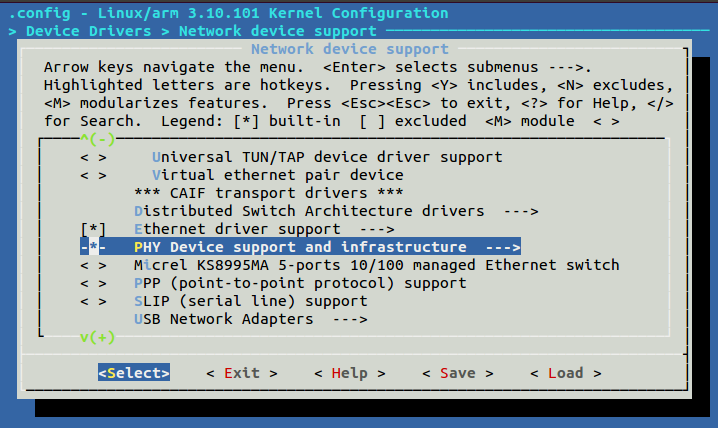
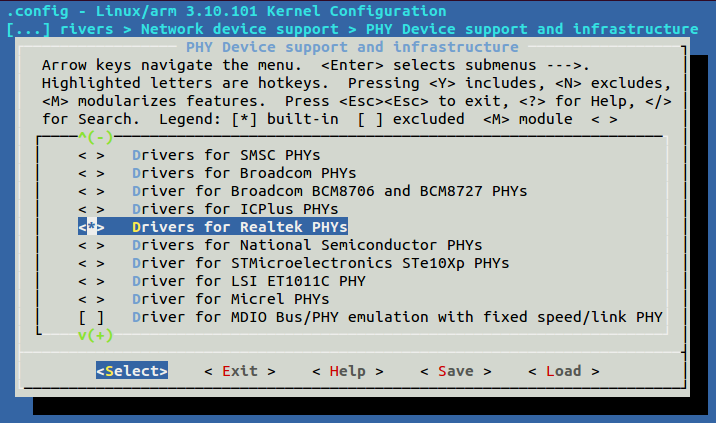
内核配置支持Realtek PHY
修改驱动添加支持rtl8201
diff -Npur a/drivers/net/phy/realtek.c b/drivers/net/phy/realtek.c
--- a/drivers/net/phy/realtek.c 2016-05-12 10:32:15.000000000 +0800
+++ b/drivers/net/phy/realtek.c 2016-08-15 13:44:43.420720361 +0800
@@ -16,9 +16,16 @@
#include <linux/phy.h>
#include <linux/module.h>
-#define RTL821x_PHYSR 0x11
-#define RTL821x_PHYSR_DUPLEX 0x2000
-#define RTL821x_PHYSR_SPEED 0xc000
+//#define RTL821x_PHYSR 0x11
+//#define RTL821x_PHYSR_DUPLEX 0x2000
+//#define RTL821x_PHYSR_SPEED 0xc000
+/* page 0 register 30 - interrupt indicators and SNR display register */
+#define RTL8201F_ISR 0x1e
+/* page 0 register 31 - page select register */
+#define RTL8201F_PSR 0x1f
+/* page 7 register 19 - interrupt, WOL enable, and LEDs function register */
+#define RTL8201F_IER 0x13
+
#define RTL821x_INER 0x12
#define RTL821x_INER_INIT 0x6400
#define RTL821x_INSR 0x13
@@ -29,6 +36,15 @@ MODULE_DESCRIPTION("Realtek PHY driver")
MODULE_AUTHOR("Johnson Leung");
MODULE_LICENSE("GPL");
+static int rtl8201f_ack_interrupt(struct phy_device *phydev)
+{
+ int err;
+
+ err = phy_read(phydev, RTL8201F_ISR);
+
+ return (err < 0) ? err : 0;
+}
+
static int rtl821x_ack_interrupt(struct phy_device *phydev)
{
int err;
@@ -38,13 +54,29 @@ static int rtl821x_ack_interrupt(struct
return (err < 0) ? err : 0;
}
-static int rtl8211b_config_intr(struct phy_device *phydev)
+static int rtl8201f_config_intr(struct phy_device *phydev)
{
int err;
+ phy_write(phydev, RTL8201F_PSR, 0x0007); /* select page 7 */
+
if (phydev->interrupts == PHY_INTERRUPT_ENABLED)
- err = phy_write(phydev, RTL821x_INER,
- RTL821x_INER_INIT);
+ err = phy_write(phydev, RTL8201F_IER, 0x3800 |
+ phy_read(phydev, RTL8201F_IER));
+ else
+ err = phy_write(phydev, RTL8201F_IER, ~0x3800 &
+ phy_read(phydev, RTL8201F_IER));
+
+ phy_write(phydev, RTL8201F_PSR, 0x0000); /* back to page 0 */
+
+ return err;
+}
+
+static int rtl8211b_config_intr(struct phy_device *phydev)
+{
+ int err;
+ if (phydev->interrupts == PHY_INTERRUPT_ENABLED)
+ err = phy_write(phydev, RTL821x_INER, RTL821x_INER_INIT);
else
err = phy_write(phydev, RTL821x_INER, 0);
@@ -64,6 +96,21 @@ static int rtl8211e_config_intr(struct p
return err;
}
+/* RTL8201F */
+static struct phy_driver rtl8201f_driver = {
+ .phy_id = 0x001cc816,
+ .name = "RTL8201F 10/100Mbps Ethernet",
+ .phy_id_mask = 0x001fffff,
+ .features = PHY_BASIC_FEATURES,
+ .flags = PHY_HAS_INTERRUPT,
+ .config_aneg = &genphy_config_aneg,
+ .read_status = &genphy_read_status,
+ .ack_interrupt = &rtl8201f_ack_interrupt,
+ .config_intr = &rtl8201f_config_intr,
+ .driver = { .owner = THIS_MODULE,},
+};
+
+
/* RTL8211B */
static struct phy_driver rtl8211b_driver = {
.phy_id = 0x001cc912,
@@ -96,16 +143,24 @@ static struct phy_driver rtl8211e_driver
static int __init realtek_init(void)
{
- int ret;
+// int ret;
- ret = phy_driver_register(&rtl8211b_driver);
- if (ret < 0)
+// ret = phy_driver_register(&rtl8211b_driver);
+// if (ret < 0)
+ if(phy_driver_register(&rtl8201f_driver) < 0)
+ {
+ return -ENODEV;
+ }
+ if(phy_driver_register(&rtl8211b_driver) < 0)
+ {
return -ENODEV;
+ }
return phy_driver_register(&rtl8211e_driver);
}
static void __exit realtek_exit(void)
{
+ phy_driver_unregister(&rtl8201f_driver);
phy_driver_unregister(&rtl8211b_driver);
phy_driver_unregister(&rtl8211e_driver);
}
@@ -114,6 +169,7 @@ module_init(realtek_init);
module_exit(realtek_exit);
static struct mdio_device_id __maybe_unused realtek_tbl[] = {
+ { 0x001cc816, 0x001fffff },
{ 0x001cc912, 0x001fffff },
{ 0x001cc915, 0x001fffff },
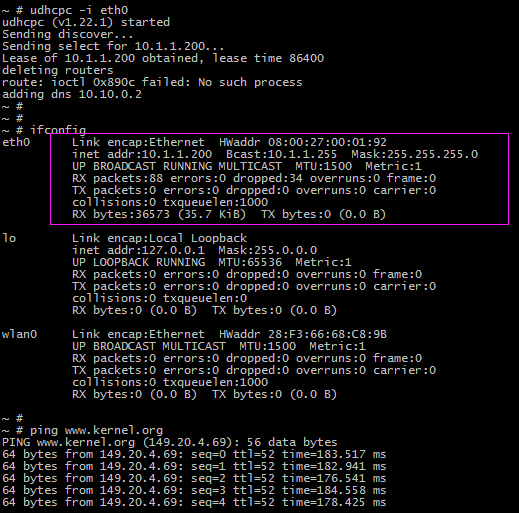
{ }相关命令调试
A beautiful web dashboard for Linux
最近提交(Master分支:2 个月前 )
186a802e
added ecosystem file for PM2 4 年前
5def40a3
Add host customization support for the NodeJS version 4 年前

旨在为数千万中国开发者提供一个无缝且高效的云端环境,以支持学习、使用和贡献开源项目。
更多推荐
 4
4 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)