
ROS下使用stm32 与rosserial进行通信的开发说明及源代码示例
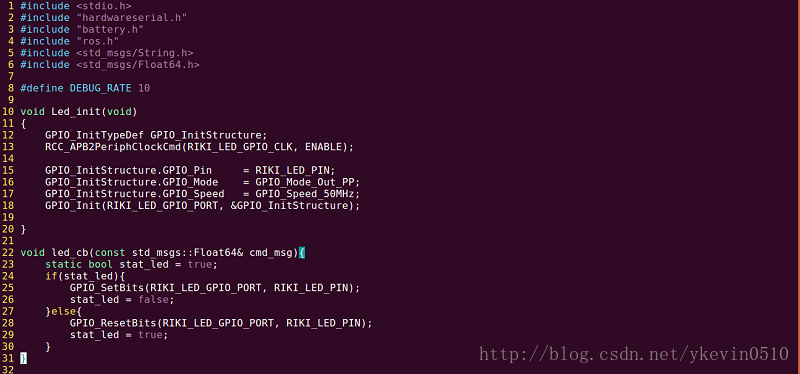
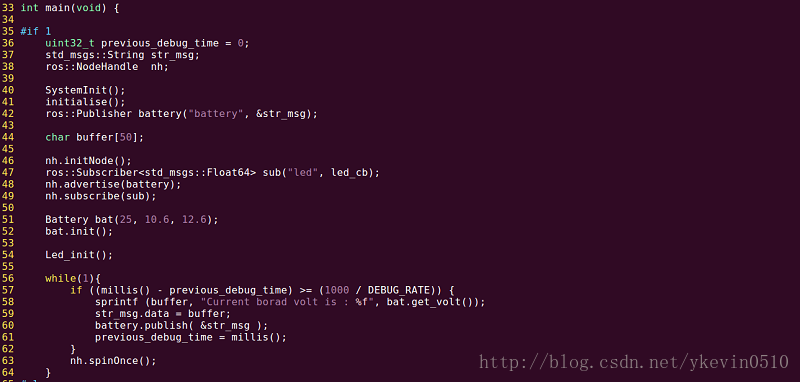
关于stm32下的ROS开发环境介绍说明,此开发环境是在Linux下使用stm32的标准库“STM32F10x_StdPeriph_Driver3.5”,进行stm32开发,整体开发框架已搭建完成,用户开发简单,只需要按自己的方式开发代码即可,它集成了ros_lib,让开发ros底层像arduino一样操作,让广大机友从写stm32解析器结点中解放出来,整体的代码风格如下:
一、开发环境的配置(ubuntu16.04系统)
1、安装编译工具链
$sudo apt-get install -y git build-essential gcc-arm-none-eabi
如果提示找不到相关安装包,请执行下面操作
$sudo add-apt-repository ppa:team-gcc-arm-embedded/ppa
$sudo apt-get update
$sudo apt-get install -y git build-essential gcc-arm-none-eabi libusb-1.0-0-dev2、安装st-link 烧写器驱动
$git clone https://github.com/texane/stlink.git
$cd stlink
$ make
$ cd build/Release
$ sudo make install
二、怎样添加自己的代码
- 1、往代码目录那面的Src、Bsp、Driver目录下面添加源码后,代码可支持C与C++,编写好代码后,请在Makefile文件中“OBJS += ./Driver/xxx.o
”的样式添加,其中“xxx”就是你代码的文件名。 - 2、编译程序,进入工程主目录,执行
- 3、如果是添加C代码时,进行混编译,请注意.c中请按下面格式编写代码,请注意只是.c代码需要添加,如果.c文件对应的有.h文件,则只需要在.h文件添加即可,.cpp代码不需要,此处作用,用户可以自己去了解,我就不赘述
#ifdef __cplusplus
extern "C" {
#endif
/*添加自己编写代码区域*/
#ifdef __cplusplus
}
#endifmake
3、确认st-link驱动是否安装好,插入st-link V2 烧写器,执行下面命令,如果有“STMicroelectronics ST-LINK/V2”,则说明st-link烧写器已被系统识别
lsusb
4、进入工程主目录,执行
make flash
三、关于项目代码结构
- 1、 Bsp目录,关于驱动的配置与串口的驱动文件都放在此目录
- 2、 Driver目录,关于模块的驱动文件都放在此目录
- 3、Src目录,main程序入口文件放在此目录
- 4、Libs,里面放了ros_lib 与 stm32 标准库
四、关于开发板的测试使用
用户购买到开发板后,一般都是烧写好测试程序的,拿到手后可直接测试,测试流程如下
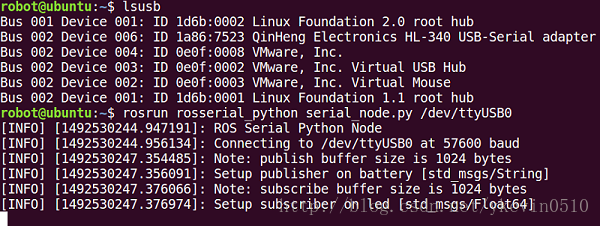
* 1、用micro usb(一定是能传输数据的usb)将开发板与PC端的ROS系统(indigo以上版本系统,如果是indigo版本系统请先删除系统默认的rosserial包,下载最新的rosserial,重新编译)相连接,连接好后检查是否识别到ttyUSB0,如果有,则说明连接正常,然后打开四个终端依次在每个终端运行
$roscore
运行下面命令,如果连接成功会出现如下图
$ rosrun rosserial_python serial_node.py /dev/ttyUSB0
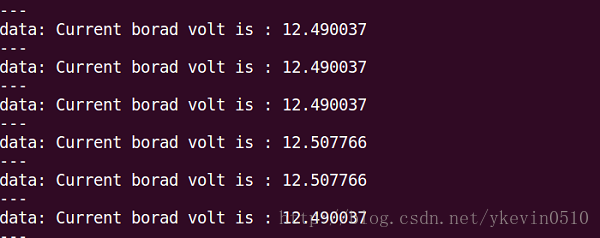
运行下面命令,则会反馈系统的供电电压值,如下图
$ rostopic echo /battery
运行下面命令,板子上的LED会以0.1s的频率闪烁
$ rostopic pub -r 10 led std_msgs/Float64 – -0.001
五、关于使用中的问题
$sudo chmod 777 /dev/ttyUSB0
1、永久解决串口权限问题, 其中riki是你系统的用户名,请替换,然后重启
$sudo usermod -aG dialout riki
2、“/dev/ttyUSB0: Input/output error” 此种问题是驱动问题,请安装我提供的驱动,将驱动源码放到ubuntu系统中
$unzip CH341SER_LINUX.zip
$ cd CH341SER_LINUX
$ make上面编译后会生ch34x.ko文件,如果你已经能识别usb说明已装了老驱动,此时将它删除,加载新驱动
$sudo rmmod ch341
$sudo insmod ch34x.ko要开机启动时自己加载驱动怎么办?
$sudo cp ch34x.ko /lib/modules/$(uname -r)/kernel/drivers/usb/serial
$sudo depmod
$sudo rm /lib/modules/$(uname -r)/kernel/drivers/usb/serial/ch341.ko3、重启系统后,执行下面命令,如果驱动有ch34x,则说明安装成功
lsmod | grep ch
六、没有st-link的在linux下用ISP烧写程序
1、安装烧写环境
$sudo apt-get install stm32flash
2、用usb串口烧写程序,烧写前请将Boot0设置为高,BOOT1设置为低,main.bin就是你要烧写的二进制文件,请替换,烧写时请按复位后,立即执行下面烧写命令,速度要快,不然会跳转失败,烧完请恢复默认设置。
$sudo stm32flash -w main.bin -v -g 0x0 /dev/ttyUSB0 -b 115200
七、关于广告
ROS QQ交流群:130486387
RIKIROBOT店铺提供两驱动、四驱动、麦克纳姆轮、Omni全向三轮、Omni全向四轮、履带、阿克曼(舵机转向)、大型负载的各种ROS车,有配套指导、及完善售后,下面是店铺的二维码与Rikirobot的交流群,有兴趣的可以扫一扫。



旨在为数千万中国开发者提供一个无缝且高效的云端环境,以支持学习、使用和贡献开源项目。
更多推荐
 8
8 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)