
基于Python+OpenCV检测物体并测量出与网络摄像头或Pi摄像头的距离
欢迎大家点赞、收藏、关注、评论啦 ,由于篇幅有限,只展示了部分核心代码。
一项目简介
一、项目背景与意义
随着计算机视觉技术的快速发展,物体检测与距离测量在工业自动化、智能监控、无人驾驶等领域发挥着越来越重要的作用。本项目旨在利用Python和OpenCV库,结合网络摄像头或Pi摄像头,实现物体的自动检测以及到摄像头距离的测量,为相关应用提供准确的数据支持。
二、技术原理
物体检测:利用OpenCV的Haar Cascade分类器或深度学习模型(如YOLO、SSD等)对图像中的物体进行检测。这些算法通过提取图像特征,训练分类器,实现对特定物体的识别。
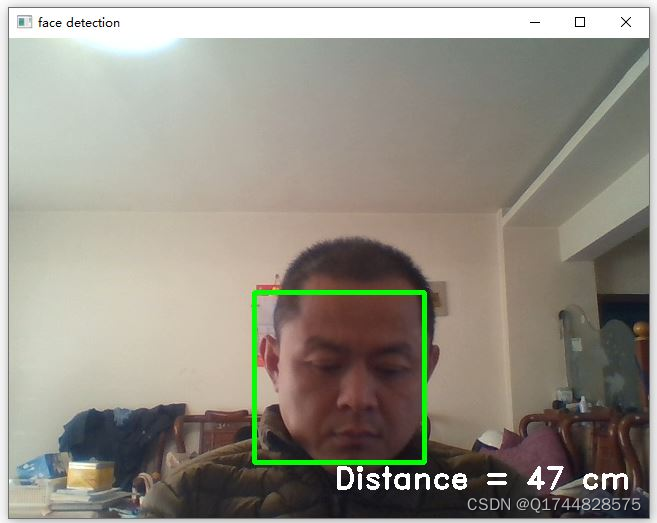
距离测量:距离测量主要通过摄像头成像原理及相似三角形原理实现。通过摄像头参数(如焦距、像素尺寸等)和图像中物体的像素尺寸,结合物体实际尺寸(如已知参考物的尺寸),可以计算出物体到摄像头的距离。
三、项目内容
环境搭建:安装Python环境,并导入OpenCV库。配置网络摄像头或Pi摄像头,确保能够正常获取图像数据。
物体检测:
选择合适的物体检测算法(如Haar Cascade、YOLO等)。
准备训练数据集,训练物体检测模型(如果使用深度学习模型)。
使用训练好的模型对图像进行物体检测,并获取检测框的位置和大小。
距离测量:
确定摄像头参数,如焦距、像素尺寸等。
选择图像中的参考物(已知实际尺寸的物体),通过检测算法获取其在图像中的像素尺寸。
利用相似三角形原理,结合摄像头参数和参考物的像素尺寸,计算物体到摄像头的距离。
结果展示:将检测到的物体在图像中用矩形框标出,并显示物体到摄像头的距离。
四、技术实现细节
物体检测:
如果使用Haar Cascade分类器,需要准备正样本和负样本图像,并使用OpenCV的opencv_createsamples和opencv_traincascade工具训练分类器。
如果使用深度学习模型,需要准备标注好的数据集,并使用深度学习框架(如TensorFlow、PyTorch等)进行模型训练。
距离测量:
摄像头参数可以通过查询摄像头文档或进行实验获取。
参考物的选择应确保其在实际场景中易于识别且尺寸已知。
相似三角形原理的应用需要确保摄像头与物体之间的光线条件一致,以避免因光线变化引起的误差。
五、项目特点与优势
实时性:利用OpenCV的高效性,可以实现物体的实时检测和距离测量。
准确性:通过精确的摄像头参数和算法优化,可以提高距离测量的准确性。
灵活性:项目支持多种摄像头设备,并可根据实际需求选择不同的物体检测算法。
二、功能
基于Python+OpenCV检测物体并测量出与网络摄像头或Pi摄像头的距离
三、系统


四. 总结
本项目在工业自动化、智能监控、无人驾驶等领域具有广泛的应用前景。例如,在工业自动化领域,可用于实现生产线上物体的自动识别和距离测量;在智能监控领域,可用于实现异常行为的自动检测和预警;在无人驾驶领域,可用于实现车辆对周围环境的感知和决策。

旨在为数千万中国开发者提供一个无缝且高效的云端环境,以支持学习、使用和贡献开源项目。
更多推荐
 11
11 0
0- 0



 已为社区贡献24条内容
已为社区贡献24条内容

所有评论(0)