
基于Python+OpenCV卡尔曼滤波进行图像处理中的多目标跟踪
欢迎大家点赞、收藏、关注、评论啦 ,由于篇幅有限,只展示了部分核心代码。
一项目简介
一、项目背景与意义
在视频监控、自动驾驶、人机交互等应用中,多目标跟踪是一个重要的技术环节。随着计算机视觉技术的不断发展,多目标跟踪算法也在不断演进。其中,基于卡尔曼滤波(Kalman Filter)的多目标跟踪算法因其高效性和准确性而备受关注。本项目旨在利用Python编程语言结合OpenCV库,实现一个基于卡尔曼滤波的多目标跟踪系统,以提高多目标跟踪的准确性和鲁棒性。
二、卡尔曼滤波简介
卡尔曼滤波是一种高效的自回归滤波器,能在存在诸多不确定性情况的组合信息中估计动态系统的状态。它利用系统的动态信息和观测信息,通过一系列迭代过程,得到系统状态的最优估计。卡尔曼滤波具有内存占用小、速度快等优点,非常适合实时问题和嵌入式系统。
三、技术原理
预测阶段:根据系统的运动方程,利用前一时刻的状态估计值和系统噪声,预测当前时刻的状态估计值。
更新阶段:根据系统的观测方程和观测噪声,结合预测阶段得到的状态估计值,利用卡尔曼增益进行加权平均,得到当前时刻的最优状态估计值。
在多目标跟踪中,我们可以将卡尔曼滤波应用于每个目标的跟踪过程中。通过对每个目标建立独立的卡尔曼滤波器,我们可以实现多目标的并行跟踪。
四、实现步骤
目标检测:使用OpenCV中的目标检测算法(如背景减除、帧间差分、光流法等)对视频帧中的目标进行检测,得到目标的初始位置和速度等状态信息。
初始化卡尔曼滤波器:为每个检测到的目标初始化一个卡尔曼滤波器,设置初始状态估计值、转移矩阵、观测矩阵、过程噪声协方差矩阵和观测噪声协方差矩阵等参数。
目标跟踪:对于每个目标,在每个视频帧中,利用卡尔曼滤波器的预测阶段和更新阶段,根据前一帧的状态估计值和当前帧的观测信息,得到当前帧的状态最优估计值。同时,利用某些关联算法(如匈牙利算法、IOU匹配等)将当前帧的检测目标与跟踪目标进行匹配,实现目标的连续跟踪。
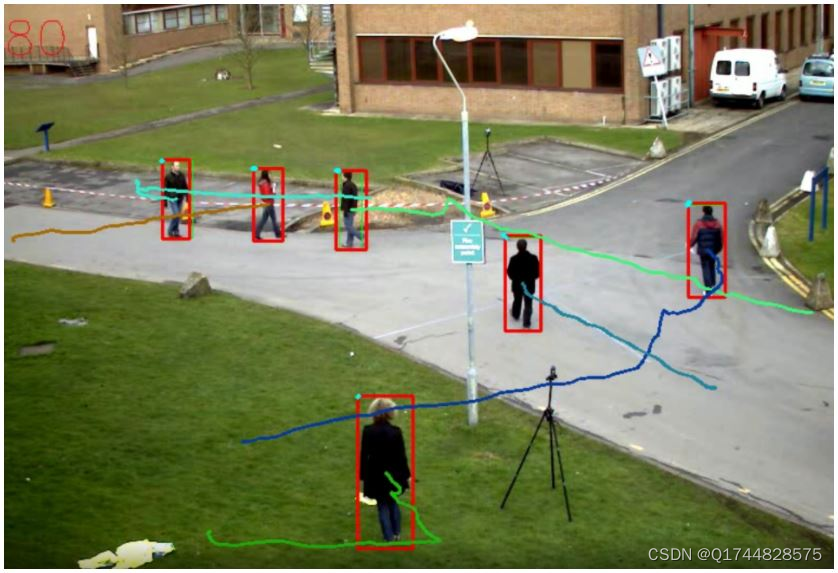
结果输出:将跟踪结果以可视化形式展示,如绘制目标的运动轨迹、显示目标的当前位置等。
五、项目特点与优势
高效性:卡尔曼滤波具有内存占用小、速度快的特点,非常适合实时多目标跟踪任务。
准确性:卡尔曼滤波能够在存在噪声和不确定性的情况下,得到系统状态的最优估计,提高多目标跟踪的准确性。
鲁棒性:卡尔曼滤波对目标的运动模型进行建模,能够在一定程度上适应目标运动状态的变化,提高多目标跟踪的鲁棒性。
可扩展性:项目采用模块化设计,便于根据实际需求进行功能扩展和定制。同时,OpenCV库提供了丰富的API和工具,方便开发者进行二次开发和优化。
二、功能
基于Python+OpenCV卡尔曼滤波进行图像处理中的多目标跟踪
三、系统

四. 总结
基于Python+OpenCV卡尔曼滤波进行图像处理中的多目标跟踪项目是一个具有实际应用价值的项目。通过利用卡尔曼滤波的高效性和准确性,结合OpenCV的强大功能,该项目能够实现对多目标的实时、准确、鲁棒跟踪。项目的完成将为视频监控、自动驾驶、人机交互等领域提供有力的技术支持。

旨在为数千万中国开发者提供一个无缝且高效的云端环境,以支持学习、使用和贡献开源项目。
更多推荐
 30
30 0
0- 0



 已为社区贡献24条内容
已为社区贡献24条内容

所有评论(0)