
SGVision坐标系标定
想要应用SGVision做视觉引导定位,但是初接触机器视觉不太懂这个要怎么引导定位。因此上周我们安排了一次抖音直播,专门讲引导定位中的坐标系标定,很多用户都说没有看到,我就整理了一下内容分享给大家。
标定后可以用来计算图像拍到的物体在机器人坐标系中的坐标值。它的原理是设置图像坐标点和机器人坐标点的对应关系,通过算法来计算出变换关系,即可知道图像上任一点的相机坐标点对应的机器人坐标。具体设置如下:
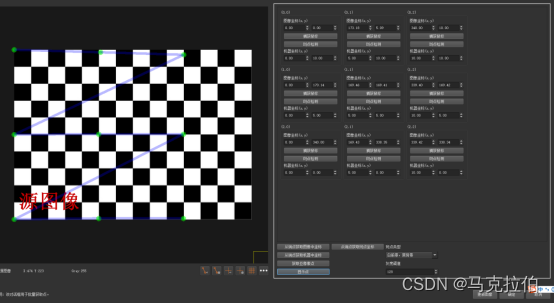
1、在SGVision的【配置】页面中【检测】【坐标系标定】打开之后我们更新图像,画面就会显示我们准备的这张棋盘格图。

SGVision采用的是多点标定,每次检测相机位置不变,相机坐标系跟机器人坐标系的关系保持不变。可以批量增加,我这边选择添加3行3列9个点进行标定。

这边添加四个点的相机坐标和机器人坐标的对应关系后,使用【从端点获取图像坐标】和【从端点获取机器坐标】自动生成相对应的坐标点。确认无误之后确定保存。

下来我们测试一下,宿便选择一个点看看对应的机械坐标对不对。在图像中我点击红色点的位置生成坐标点,让后点【获取亚像素点】获取更精确的坐标。
测试(图像——机器)计算出相对应的机械坐标。我们看到有小数点,这个就是误差的问题了。
相对应的再测试(机器——图像)看看计算出的对应坐标是否正确。

在变换类型这里【尝试仿射变换】包括了平移旋转和反转,如果尝试变换失败的话,他会直接使用透射变换。【透射变换】这个是三维坐标系中的图像变化。【全仿射变化】是包括刚才的变化之外缩放剪切之类的仿射变换。
我们【读取变换点】,【获取对照】看看图中的绿色点就是图像的坐标点,红色的是机械的坐标点。通过这个就可以看出来偏差的大小。偏差大的点可以删除后重新添加。

一直到没有问题的话就可以确定保存了。这边就标定完成了。
SGVision免费商用,需要的可以直接去搜索下载。

旨在为数千万中国开发者提供一个无缝且高效的云端环境,以支持学习、使用和贡献开源项目。
更多推荐
 0
0 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)