
基于Python+OpenCV霍夫直线检测 检测车道线
欢迎大家点赞、收藏、关注、评论啦 ,由于篇幅有限,只展示了部分核心代码。
一项目简介
一、项目背景
在自动驾驶和辅助驾驶系统中,车道线检测是一项关键技术,它对于保持车辆在车道内行驶、避免偏离道路以及进行路径规划等都具有重要意义。本项目利用Python编程语言结合OpenCV库中的霍夫直线检测技术,实现对车道线的准确识别。
二、技术原理
霍夫直线检测是一种基于霍夫空间的图像特征提取算法,其核心思想是将图像中的点映射到一个参数空间,通过累加器技术检测图像中的直线。对于车道线检测,我们可以将车道线视为图像中的直线特征,通过霍夫直线检测算法进行识别。
三、实现步骤
图像预处理:
读取图像,并转换为灰度图像,以减少计算量。
应用高斯模糊减少图像噪声。
使用Canny边缘检测算法提取图像中的边缘信息,得到边缘图像。
霍夫直线检测:
初始化霍夫空间,设定参数ρ(直线与原点距离)和θ(直线与x轴夹角)的范围和步长。
对边缘图像中的每个边缘点,在霍夫空间中计算其对应的所有可能的线或圆的参数,并进行累加投票。
设定阈值,只保留投票数超过阈值的参数,排除噪声和边缘点引起的干扰。
将参数空间中投票最多的点解码回图像空间,得到检测到的直线,即车道线。
车道线识别与优化
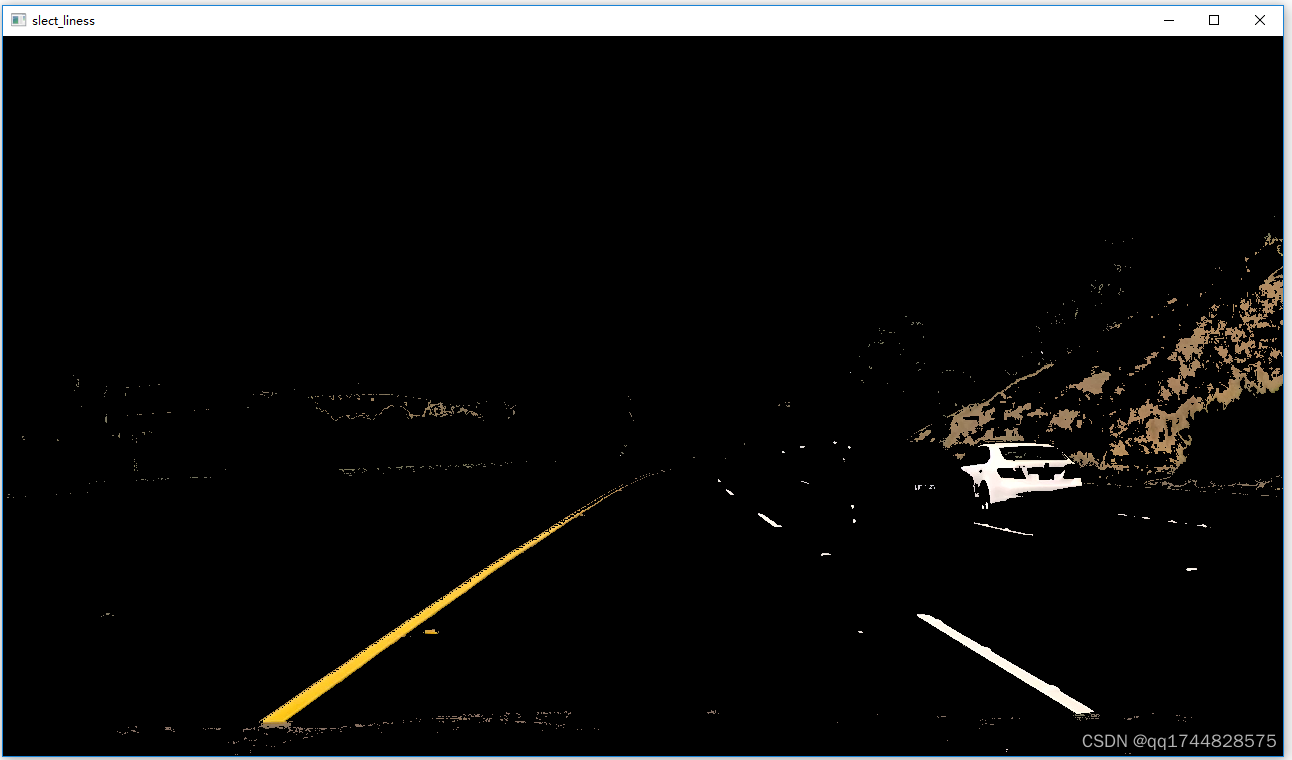
根据车道线的特点(如颜色、宽度等),对检测到的直线进行筛选,排除非车道线。
应用透视变换对图像进行校正,使车道线在图像中呈现平行状态,便于后续处理。
对识别出的车道线进行拟合,得到更准确的车道线方程。
四、项目特点
准确性高:通过霍夫直线检测算法和后续的优化处理,能够准确识别车道线,提高驾驶安全性。
实时性强:利用Python和OpenCV的高效性,系统能够实时处理视频流中的每一帧图像,实现车道线的实时检测。
二、功能
基于Python+OpenCV霍夫直线检测 检测车道线
三、系统


四. 总结
本项目实现的车道线检测技术可以广泛应用于自动驾驶、辅助驾驶、智能监控等领域。通过准确识别车道线,系统可以为车辆提供导航和决策支持,提高驾驶安全性和智能化水平。同时,该技术还可以与其他自动驾驶技术相结合,实现更加复杂的功能和应用。

旨在为数千万中国开发者提供一个无缝且高效的云端环境,以支持学习、使用和贡献开源项目。
更多推荐
 3
3 0
0- 0



 已为社区贡献17条内容
已为社区贡献17条内容

所有评论(0)