
基于YOLOV8+移动窗口切片(完整版)+OnnxRuntime+KMeans+Zbar+传统图像处理算法的大图片小目标光伏产线条码检测研究
文章目录
前言
关于条码检测方案,一共有三部曲:
[1] 基于Opencv+Kmeans+Zbar的条码检测与基于锐化+双边高斯滤波+Zbar的条码检测在工业光伏产线上的检测效果研究
[2]大图像中的小目标检测——基于YOLOV8+OnnxRuntime部署+滑动窗口+Zbar的条码检测研究
本文是最后一篇,本专题三篇是步步深入的,因此如果觉得本文比较难,可以先看前两篇。这个专题的研究大概持续一个月左右,从传统学习到深度学习再到将传统机器学习算法和深度学习相结合,如今已经十分贴近工业应用的场合了,甚至超过了一般工业所见的条码场合的。
本文可以用在:
前提是完全理解本文在的算法和思维角度。
- 应届生简历(难度很大,但一定是加分项,本人做过公司硕士的面试官,但是没有遇见特别亮眼的项目)
- 进阶深度学习的素材(适合对yolov8+传统算法都要有基础的伙伴)
- 毕业课题(专硕是可以使用qt封装本算法,之后做几个实验基本是没问题的)
本文以条码检测为引,但本文作用不仅仅局限于此。本文记录了本人思考问题的过程,可以尝试问一下自己,在面对那些问题的时候,你会用什么方式处理。
声明:本项目是原创且开源的,本项目旨在帮助对cv深度学习感兴趣的伙伴,如要转载请注明出处。也希望大家帮忙支持点一下赞,谢谢。
1 项目背景
条码检测是常见的工业应用场合,在国内可以用visionpro、halcon等一些软件自带的条码检测软件来实现。最近出现了国外项目,一些国内可以用的软件在国外都需要版权了,懂的都懂。因此opencv开发就显得十分重要了。本文采用目标检测用的是yolov8,解码器用的是Zbar,这两个包工程化都很好,可以大大缩短项目的开发周期。通过查阅资料以及自己试验,Zbar无法实现对复杂的工业环境的条码检测,问题主要出现在图像分辨率、环境光源,因此为了实现更准确更有效的的工业条码检测,本文基于YOLOV8+移动窗口切片(完整版)+OnnxRuntime+KMeans+Zbar+传统图像处理算法对大图片小目标光伏产线条码检测进行了研究。
2 训练YOLOV8的一维码检测模型
- 关于如何训练模型不是本文的重点,可以根据这篇文章简单训练一个模型(YOLOV8目标检测——最全完整的模型训练记录)
- 如果需要本人训练好的模型可以在这里下载( 文章顶部文件包:best.pt、best.onnx、 数据集、实验图片)
3 读取测试图片
import cv2
import numpy as np
from PIL import Image
import onnxruntime
import torch
# 有 GPU 就用 GPU,没有就用 CPU
device = torch.device('cuda:0' if torch.cuda.is_available() else 'cpu')
import matplotlib.pyplot as plt
%matplotlib inline
# 显示图片
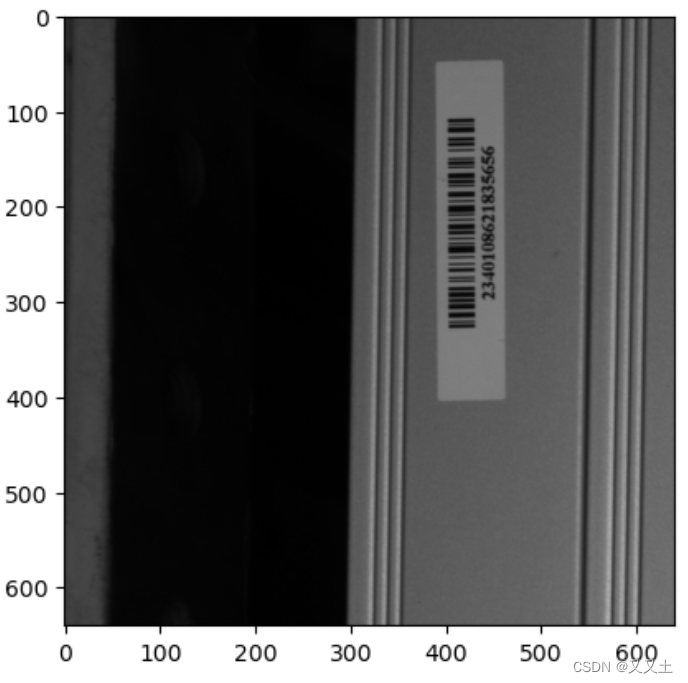
image = cv2.imread("D:/yolov5-6/data/images/Pic_2023_04_18_104022_3.bmp")
plt.imshow(image[:,:,::-1])
image_1 = image.copy()

3.1 调整首窗口位置
img_test = image[340:980,0:640]
plt.imshow(img_test[:,:,::-1])

4 创建滑动窗口,窗口大小为(640,640),移动距离为160,对不足(640,640)的窗口进行填充
-
win_coordinate记录了窗口切片在原图中的位置,所以为什么要这么做呢?
-
思考一个问题:我们用yolov8检测出了条码,那么在画检测框是在原图上画好,还是在窗口切片上画好呢?
-
先带着这个疑问看下去。
win = 0
image_list = [] # 用来存储滑动窗口
win_coordinate = []#记录窗口左上角坐标 [x,y],图片横向为x轴与笛卡尔坐标系一样
while(win<4000):
img_test = image[340:980,win:win+640]
win_coordinate.append([win,340])
if img_test.shape[1]<640:
top = 0
bottom = 0
left = 0
right = 640-img_test.shape[1]
img_test = cv2.copyMakeBorder(img_test,top,bottom,left,right,cv2.BORDER_CONSTANT,value=[255,255,255])
image_list.append(img_test)
win = win + 160

- 看一下窗口切片
- 15个条码,这里每个窗口里的条码加起来50个左右,也就是肯定有检测重复的条码
- 思考一个问题:如何去除重复的条码
for i in range(len(image_list)):
plt.subplot(5,8,i+1)
plt.imshow(image_list[i][:,:,::-1])
plt.show()

5 创建Onnxruntime推理引擎并测试
ort_session = onnxruntime.InferenceSession('E:/ultralytics/runs/detect/train4/weights/best.onnx', providers=['CUDAExecutionProvider', 'CPUExecutionProvider'])
5.1推理测试
x = torch.randn(1, 3, 640, 640).numpy()
ort_inputs = {'images': x}
ort_output = ort_session.run(['output0'], ort_inputs)[0]
ort_output
输出了结果,说明onnxruntime引擎没有问题。

5.2获得ONNX模型输入层(输出层)和数据维度


5.3 预处理-构造输入张量 torch_list
这里是标准的yolov8输入图像的预处理模式
# 有 GPU 就用 GPU,没有就用 CPU
torch_list = []
for i in range(len(image_list)):
# 预处理-归一化
image = image_list[i][:,:,::-1]
image = image / 255
# 预处理-构造输入 Tensor
image = np.expand_dims(image, axis=0) # 加 batch 维度
image = image.transpose((0, 3, 1, 2)) # N, C, H, W
image = np.ascontiguousarray(image) # 将内存不连续存储的数组,转换为内存连续存储的数组,使得内存访问速度更快
image = torch.from_numpy(image).to(device).float() # 转 Pytorch Tensor
# input_tensor = input_tensor.half() # 是否开启半精度,即 uint8 转 fp16,默认转 fp32
torch_list.append(image)
可以查看一下相关数据

6 执行推理预测
当你在对切片处理的时候,还需要用字典去标记切片的,即:{切片:目标检测结果}。这个字典是贯穿始终的,能够保证最后把检测之后的切片,贴到原图的时候,知道那个预测结果是哪个窗口预测得来的。
preds_dict = {}
for i in range(len(torch_list)):
# ONNX Runtime 推理预测
ort_output = ort_session.run(output_name, {input_name[0]: torch_list[i].cpu().numpy()})[0]
# 转 Tensor
preds = torch.Tensor(ort_output)
preds_dict[str(i)] = preds

7 后处理-置信度过滤、NMS过滤
from ultralytics.utils import ops
for i in range(len(preds_dict)):
pred = ops.non_max_suppression(preds_dict[str(i)], conf_thres=0.7, iou_thres=0.7, nc=1)
preds_dict[str(i)] = pred[0]
经过非极大值抑制,条码基本都被标记出来了。

8 重构preds_dict坐标
8.1 把目标的坐标还原回原图的坐标
- 目标检测预测结果:左上角X、左上角Y、右下角X、右下角Y、置信度、类别ID
- 这里可以回答:为什么要用win_coordinate记录窗口坐标
rect_array = [] # 提取出所有框
for i in range(len(preds_dict)):
for j in range(len(preds_dict[str(i)])):
preds_dict[str(i)][j][0] += win_coordinate[i][0]
preds_dict[str(i)][j][2] += win_coordinate[i][0]
preds_dict[str(i)][j][1] += win_coordinate[i][1]
preds_dict[str(i)][j][3] += win_coordinate[i][1]
rect_array.append(preds_dict[str(i)][j])
- 重构之后的效果

9 去重——用KMeans将检测目标分成15类
- 回答使用什么方法去除重复的检测框
from sklearn.cluster import KMeans
k_means = KMeans(init="k-means++", n_clusters=15, n_init=10)
k_means.fit(rect_array)

- 重新处理预测结果,数据真漂亮
list_right = []
list_right_1 = []
label = k_means.labels_
for i in range(len(label)):
if label[i] not in list_right:
list_right.append(label[i])
list_right_1.append(i)
new_preds = []
for i in list_right_1:
new_preds.append(list(rect_array[i]))
new_preds
new_preds = np.array(new_preds, dtype = "uint32")
new_preds

10 opencv 可视化
# 框(rectangle)可视化配置
bbox_color = (150, 0, 0) # 框的 BGR 颜色
bbox_thickness = 6 # 框的线宽
# 框类别文字
bbox_labelstr = {
'font_size':1, # 字体大小
'font_thickness':1, # 字体粗细
'offset_x':0, # X 方向,文字偏移距离,向右为正
'offset_y':-10, # Y 方向,文字偏移距离,向下为正
}
10.1 用Zbar识别二维码
- 条码剪切+锐化+双边滤波
def cv_filter2d(img):
kernel = np.array([[0, -1, 0],
[-1, 5, -1],
[0, -1, 0]])
img = cv2.filter2D(img, -1, kernel)
return img
codes = []
for bbox_xyxy in bboxes_xyxy:
code = image_1[bbox_xyxy[1]-20:bbox_xyxy[3]+20,bbox_xyxy[0]-20:bbox_xyxy[2]+40] # 主要是要考虑你画出框是不是比较合适。yolov8的框也是可以微调的
code = cv_filter2d(code)
code = cv2.bilateralFilter(src=code, d=5, sigmaColor=255, sigmaSpace=15)
codes.append(code)
codes
- 双边滤波参数介绍一波

# 展示一下提取到的条码图片
for i in range(len(codes)):
plt.subplot(4,5,i+1)
plt.imshow(codes[i],cmap="gray")
plt.show()

10.2 ZBar解码
from pyzbar import pyzbar
res_1=[]
for i in range(len(codes)):
res = pyzbar.decode(codes[i])
res_1.append(res)
res_1

10.3 绘制检测框
- 回答一下上述问题:我们用yolov8检测出了条码,那么在画检测框是在原图上画好,还是在窗口切片上画好呢?
- 个人觉绘制在原图上会比较好。
- 检测框上标注的lable是解码数字,每个条码都能被被清楚定位和解码。
for i in range(len(res_1)):
# 获取框的预测类别(对于关键点检测,只有一个类别)
bbox_label = str(res_1[i][0].data,encoding="utf-8")
# 画框
image_1 = cv2.rectangle(image_1, (bboxes_xyxy[i][0]-20, bboxes_xyxy[i][1]-20), (bboxes_xyxy[i][2]+40, bboxes_xyxy[i][3]+20), bbox_color, bbox_thickness)
# 写框类别文字:图片,文字字符串,文字左上角坐标,字体,字体大小,颜色,字体粗细
image_1 = cv2.putText(image_1, bbox_label, (bboxes_xyxy[i][0]+bbox_labelstr['offset_x'], bboxes_xyxy[i][1]+bbox_labelstr['offset_y']), cv2.FONT_HERSHEY_SIMPLEX, bbox_labelstr['font_size'], bbox_color, bbox_labelstr['font_thickness'])
plt.imshow(image_1[:,:,::-1])

总结
市面上有很多条码、二维码检测的算法,最让人印象深刻的就是腾讯微信扫码——基于SSD和超分算法的二维码检测方式。本文深受启发,将SSD的提取网络换成YOLOV8,将二维码的提取换成一维码。总的来说,试一次不错的体验。
本人是一名计算机视觉应用工程师,喜欢将算法应用于实际当中,这是自己的乐趣,如有什么需要讨论,欢迎评论区留言。
如您百忙之中还看到了这里,那是缘分。想来您和我一样对深度学习的应用深有兴趣,还请您帮忙点个赞,以便于更多的你我这样的人发现本文章,谢谢。
相关文章
[1] 基于Opencv+Kmeans+Zbar的条码检测与基于锐化+双边高斯滤波+Zbar的条码检测在工业光伏产线上的检测效果研究
[2]大图像中的小目标检测——基于YOLOV8+OnnxRuntime部署+滑动窗口+Zbar的条码检测研究


旨在为数千万中国开发者提供一个无缝且高效的云端环境,以支持学习、使用和贡献开源项目。
更多推荐


 6
6 0
0- 0



 已为社区贡献11条内容
已为社区贡献11条内容

所有评论(0)