YOLOv5实时检测调用usb摄像头 [ jetson nano -Ubuntu18.4 - Astra pro相机 ]
·
在基于rosmaster小车的jetson nano主板部署yolo v5目标检测网络的时候发现无法打开摄像头Astra pro进行实时监测,所以记录一下解决方法:
0.确认摄像头可用
首先先参考我上一篇博客所记录的方法打开USB摄像头:
Jetson Nano打开USB摄像头(Rosmaster小车)
1.输入指令
ls /dev/查看可用设备是否有video(如video0、video1、video2等):

如果有的话跳转到第步,没有的话继续看:
3.输入指令使用nvgstcapture gstreamer应用程序通过nvidiaapi访问相机功能
# V4L2 USB camera (where <N> is the /dev/videoN node)
nvgstcapture-1.0 --camsrc=0 --cap-dev-node=0
可以看到:
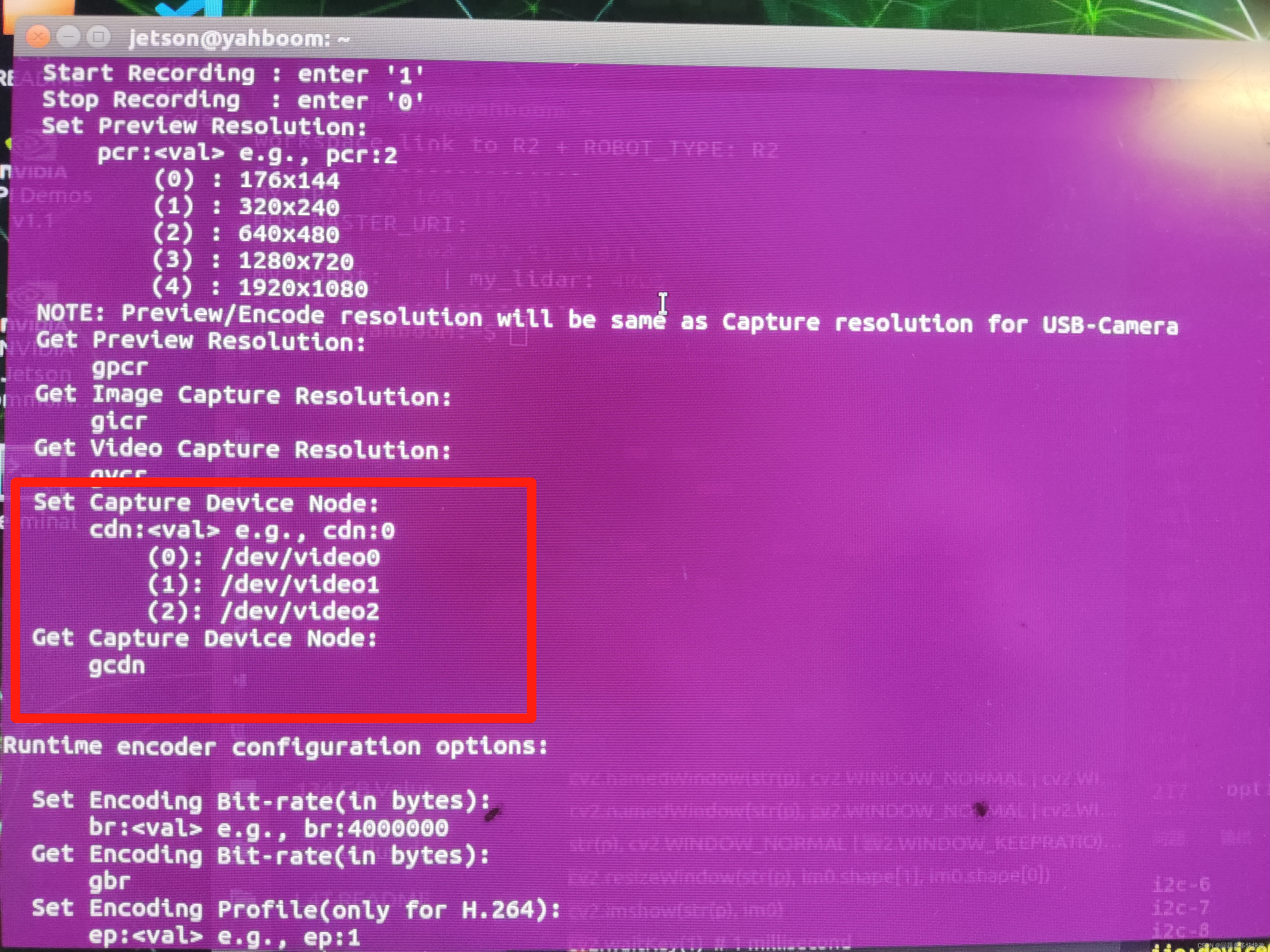
想把该设备命名为video0、video1、video2都行,这也决定了后续yolo detect代码对应的改动:

cdn输出代表该设备命名为video0了,再次输入指令
ls /dev/可以看到:

或者输入指令:
v4l2-ctl --list-devices可以看到:

4.对detect.py代码进行对应的改动:

我的是将default改为’0’使用摄像头,但你的是多少,要看指令
v4l2-ctl --list-devices输出的设备有哪些,想调用的摄像头名称是video1的话,就将default改为’1’使用该摄像头,运行应该就没问题了:


AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 4
4 0
0- 0



 已为社区贡献8条内容
已为社区贡献8条内容

所有评论(0)