
使用VScode开发STM32:基于CMake(包含标准库和HAL库工程)
使用VScode开发STM32:基于CMake(包含标准库和HAL库工程)
本教程使用VScode作为代码编辑工具、Cmake作为构建系统生成器、Make进行构建系统、使用arm-none-eabi-gcc进行交叉编译、使用OpenOCD作为代码下载与调试工具,最终搭建出适用于ARM架构系列芯片的开发环境。此教程以STM32F103ZET6芯片为例。
经验证,可满足基本基本项目需求。但我发现arm-none-eabi-gcc编译器相比于keil的AC5、AC6编译器,所编译的hex文件比较大,Flash占用较高,为了兼顾keil开发项目,也为了能够与其他人的项目兼容,这里的keil与VScode的项目文件互不干扰,满足兼容性需求。
本文涉及的软件安装包、工程模板已放在我的百度网盘中,需要自取(本教程使用的是标准库,HAL库与其基本相同,具体差异请参考分享的文件自行对照)。
链接:https://pan.baidu.com/s/1N4DI9GpaRnCr-4J0uCTTHw?pwd=wqfz
提取码:wqfz
--来自百度网盘超级会员V4的分享
一、软件安装
已默认电脑上存在VScode,这里不讲述Vscode的安装。
涉及软件的安装配置:
- 安装Cmake
- 安装arm-none-eabi-gcc
- 安装OpenOCD
- MinGW
- 安装VScode插件C/C++、CMake、Cortex-Debug
1.1 安装CMake
1.1.1 安装
下载地址:
https://cmake.org/download/
选择适合自己电脑的最新版本进行下载并安装,我这里选择cmake-3.29.2-windows-x86_64.msi,如下图:

1.1.2 添加环境变量
我们需要将cmake的可执行文件的文件夹路径添加到环境变量,方便使用命令调用cmake,我的路径为:
D:\RJ\CMake\bin
将以上目录添加到系统环境变量中去。
1.1.3 验证
在终端输入以下命令,验证是否安装成功。
cmake
成功则将显示以下内容:

1.2 安装arm-none-eabi-gcc
1.2.1 安装
下载地址:
https://developer.arm.com/downloads/-/gnu-rm
选择适合自己电脑的最新版本进行下载并安装,我这里选择gcc-arm-none-eabi-10.3-2021.10-win32.exe,如下图:

1.2.2 添加环境变量
我们需要将arm-gcc的可执行文件的文件夹路径添加到环境变量,方便使用命令调用arm-gcc,我的路径为:
D:\RJ\ARM-GCC\10 2021.10\bin
将以上目录添加到系统环境变量中去。
1.2.3 验证
在终端输入以下命令,验证是否安装成功。
arm-none-eabi-gcc
成功则将显示以下内容:

1.3 安装OpenOCD
1.3.1 安装
下载地址:
https://gnutoolchains.com/arm-eabi/openocd/
选择适合自己电脑的最新版本进行下载,直接下载的是压缩包文件,解压后可直接使用,我这里选择openocd-20231002.7z,如下图:

1.3.2 添加环境变量
我们需要将OpenOCD的可执行文件的文件夹路径添加到环境变量,方便使用命令调用OpenOCD,我的路径为:
D:\RJ\OpenOCD-20231002-0.12.0\bin
将以上目录添加到系统环境变量中去。
1.3.3 验证
在终端输入以下命令,验证是否安装成功。
openOCD
成功则将显示以下内容:

1.4 安装MinGW
1.4.1 安装
下载地址:
https://sourceforge.net/projects/mingw-w64/files/
选择适合自己电脑的最新版本进行下载,直接下载的是压缩包文件,解压后的mingw64可直接使用,我这里选择MinGW-W64GCC-8.1.0下的x86_64-posix-sjlj,如下图:

1.4.2 添加环境变量
我们需要将make的可执行文件的文件夹路径添加到环境变量,方便使用命令调用make,我的路径为:
D:\RJ\mingw64\bin
将以上目录添加到系统环境变量中去。
1.3.3 验证
在终端输入以下命令,验证是否安装成功(由于Window下make执行程序为mingw32-make.exe,我这里将其复制保存同目录下为副本,并改名为make.exe)。
make
成功则将显示以下内容:

1.5 在Vscode中安装插件
要安装的插件如下:

二、工程搭建
以下是我的工程框架

与ARM-MDK工程不同,我们配置工程还需要格外的文件,分别是CMakeLists.txt、startup_stm32f10x_hd.s、STM32F103ZETx_FLASH.ld。
2.1 配置CMakeLists.txt文件
CMake根据CMakeLists.txt进行构建,从而创建出Makefile,再由make根据 Makefile 定义的规则调用 GCC 执行编译工作,最终生成可执行的.elf或者.hex文件。以下是CMakeLists.txt的模板,需要更改的部分我已经标明。
#THIS FILE IS AUTO GENERATED FROM THE TEMPLATE! DO NOT CHANGE!
set(CMAKE_SYSTEM_NAME Generic)
set(CMAKE_SYSTEM_VERSION 1)
cmake_minimum_required(VERSION 3.20)
# specify cross compilers and tools
set(CMAKE_C_COMPILER arm-none-eabi-gcc)
set(CMAKE_CXX_COMPILER arm-none-eabi-g++)
set(CMAKE_ASM_COMPILER arm-none-eabi-gcc)
set(CMAKE_AR arm-none-eabi-ar)
set(CMAKE_OBJCOPY arm-none-eabi-objcopy)
set(CMAKE_OBJDUMP arm-none-eabi-objdump)
set(SIZE arm-none-eabi-size)
set(CMAKE_TRY_COMPILE_TARGET_TYPE STATIC_LIBRARY)
# project settings
project(Project C CXX ASM)
set(CMAKE_CXX_STANDARD 17)
set(CMAKE_C_STANDARD 11)
#Uncomment for hardware floating point
#add_compile_definitions(ARM_MATH_CM4;ARM_MATH_MATRIX_CHECK;ARM_MATH_ROUNDING)
#add_compile_options(-mfloat-abi=hard -mfpu=fpv4-sp-d16)
#add_link_options(-mfloat-abi=hard -mfpu=fpv4-sp-d16)
#Uncomment for software floating point
#add_compile_options(-mfloat-abi=soft)
add_compile_options(-mcpu=cortex-m3 -mthumb -mthumb-interwork)
add_compile_options(-ffunction-sections -fdata-sections -fno-common -fmessage-length=0)
# uncomment to mitigate c++17 absolute addresses warnings
#set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -Wno-register")
if ("${CMAKE_BUILD_TYPE}" STREQUAL "Release")
message(VERBOSE "Maximum optimization for speed")
add_compile_options(-Ofast)
elseif ("${CMAKE_BUILD_TYPE}" STREQUAL "RelWithDebInfo")
message(VERBOSE "Maximum optimization for speed, debug info included")
add_compile_options(-Ofast -g)
elseif ("${CMAKE_BUILD_TYPE}" STREQUAL "MinSizeRel")
message(VERBOSE "Maximum optimization for size")
add_compile_options(-Os)
else ()
message(VERBOSE "Minimal optimization, debug info included")
add_compile_options(-Og -g)
endif ()
#添加宏定义
add_definitions(-DUSE_HAL_DRIVER -DSTM32F103xB -DUSE_STDPERIPH_DRIVER -DSTM32F10X_HD)
#添加头文件路径,即.h文件
include_directories(./STM32F10x_FWLib/inc ./User ./Project/Code-Cmake)
#添加源文件路径,即.c或者.s文件
file(GLOB_RECURSE SOURCES ./STM32F10x_FWLib/src/*.c ./User/*.c ./Project/Code-Cmake/*.*)
#添加你的STM32F103ZETx_FLASH.ld的连接脚本路径
set(LINKER_SCRIPT ${CMAKE_SOURCE_DIR}/Project/Code-Cmake/STM32F103ZETx_FLASH.ld)
add_link_options(-Wl,-gc-sections,--print-memory-usage,-Map=${PROJECT_BINARY_DIR}/${PROJECT_NAME}.map)
#选择cortex-m3内核
add_link_options(-mcpu=cortex-m3 -mthumb -mthumb-interwork)
add_link_options(-T ${LINKER_SCRIPT})
add_link_options(-specs=nano.specs -specs=nosys.specs -u _printf_float)
add_executable(${PROJECT_NAME}.elf ${SOURCES} ${LINKER_SCRIPT})
set(HEX_FILE ${PROJECT_BINARY_DIR}/${PROJECT_NAME}.hex)
set(BIN_FILE ${PROJECT_BINARY_DIR}/${PROJECT_NAME}.bin)
add_custom_command(TARGET ${PROJECT_NAME}.elf POST_BUILD
COMMAND ${CMAKE_OBJCOPY} -Oihex $<TARGET_FILE:${PROJECT_NAME}.elf> ${HEX_FILE}
COMMAND ${CMAKE_OBJCOPY} -Obinary $<TARGET_FILE:${PROJECT_NAME}.elf> ${BIN_FILE}
COMMENT "Building ${HEX_FILE}
Building ${BIN_FILE}")
2.2 选择startup_stm32f10x_hd.s
在我们创建ARM-MDK工程时,我们从官方的固件包中选择的是arm版本的启动文件,在这里我们要选择gcc版本的启动文件,即下图中的gcc_ride7。同时为了与ARM-MDK有所区分,我将该文件放在了/Project/Code-Cmake文件夹下。

2.3 STM32F103ZETx_FLASH.ld
STM32F103ZETx_FLASH.ld是一个链接脚本文件,它告诉编译器相关的编译后的可执行代码,内存变量,中断向量,链接在哪个存储区。获取方式主要有三种(请根据自己单片机型号选择):
- 使用CudeMax编译过程可以生成该链接脚本
- 搜索已有的工程,你可以直接在浏览器搜索STM32F103ZETx_FLASH.ld,一般都有。
- 如果你对该型号芯片足够了解,可以自行编写。
以下是我的STM32F103ZETx_FLASH.ld:
/*
******************************************************************************
**
** @file : LinkerScript.ld
**
** @author : Auto-generated by STM32CubeIDE
**
** @brief : Linker script for STM32F103ZETx Device from STM32F1 series
** 512Kbytes FLASH
** 64Kbytes RAM
**
** Set heap size, stack size and stack location according
** to application requirements.
**
** Set memory bank area and size if external memory is used
**
** Target : STMicroelectronics STM32
**
** Distribution: The file is distributed as is, without any warranty
** of any kind.
**
******************************************************************************
** @attention
**
** <h2><center>© Copyright (c) 2021 STMicroelectronics.
** All rights reserved.</center></h2>
**
** This software component is licensed by ST under BSD 3-Clause license,
** the "License"; You may not use this file except in compliance with the
** License. You may obtain a copy of the License at:
** opensource.org/licenses/BSD-3-Clause
**
******************************************************************************
*/
/* Entry Point */
ENTRY(Reset_Handler)
/* Highest address of the user mode stack */
_estack = ORIGIN(RAM) + LENGTH(RAM); /* end of "RAM" Ram type memory */
_Min_Heap_Size = 0x200 ; /* required amount of heap */
_Min_Stack_Size = 0x400 ; /* required amount of stack */
/* Memories definition */
MEMORY
{
RAM (xrw) : ORIGIN = 0x20000000, LENGTH = 64K
FLASH (rx) : ORIGIN = 0x8000000, LENGTH = 512K
}
/* Sections */
SECTIONS
{
/* The startup code into "FLASH" Rom type memory */
.isr_vector :
{
. = ALIGN(4);
KEEP(*(.isr_vector)) /* Startup code */
. = ALIGN(4);
} >FLASH
/* The program code and other data into "FLASH" Rom type memory */
.text :
{
. = ALIGN(4);
*(.text) /* .text sections (code) */
*(.text*) /* .text* sections (code) */
*(.glue_7) /* glue arm to thumb code */
*(.glue_7t) /* glue thumb to arm code */
*(.eh_frame)
KEEP (*(.init))
KEEP (*(.fini))
. = ALIGN(4);
_etext = .; /* define a global symbols at end of code */
} >FLASH
/* Constant data into "FLASH" Rom type memory */
.rodata :
{
. = ALIGN(4);
*(.rodata) /* .rodata sections (constants, strings, etc.) */
*(.rodata*) /* .rodata* sections (constants, strings, etc.) */
. = ALIGN(4);
} >FLASH
.ARM.extab : {
. = ALIGN(4);
*(.ARM.extab* .gnu.linkonce.armextab.*)
. = ALIGN(4);
} >FLASH
.ARM : {
. = ALIGN(4);
__exidx_start = .;
*(.ARM.exidx*)
__exidx_end = .;
. = ALIGN(4);
} >FLASH
.preinit_array :
{
. = ALIGN(4);
PROVIDE_HIDDEN (__preinit_array_start = .);
KEEP (*(.preinit_array*))
PROVIDE_HIDDEN (__preinit_array_end = .);
. = ALIGN(4);
} >FLASH
.init_array :
{
. = ALIGN(4);
PROVIDE_HIDDEN (__init_array_start = .);
KEEP (*(SORT(.init_array.*)))
KEEP (*(.init_array*))
PROVIDE_HIDDEN (__init_array_end = .);
. = ALIGN(4);
} >FLASH
.fini_array :
{
. = ALIGN(4);
PROVIDE_HIDDEN (__fini_array_start = .);
KEEP (*(SORT(.fini_array.*)))
KEEP (*(.fini_array*))
PROVIDE_HIDDEN (__fini_array_end = .);
. = ALIGN(4);
} >FLASH
/* Used by the startup to initialize data */
_sidata = LOADADDR(.data);
/* Initialized data sections into "RAM" Ram type memory */
.data :
{
. = ALIGN(4);
_sdata = .; /* create a global symbol at data start */
*(.data) /* .data sections */
*(.data*) /* .data* sections */
*(.RamFunc) /* .RamFunc sections */
*(.RamFunc*) /* .RamFunc* sections */
. = ALIGN(4);
_edata = .; /* define a global symbol at data end */
} >RAM AT> FLASH
/* Uninitialized data section into "RAM" Ram type memory */
. = ALIGN(4);
.bss :
{
/* This is used by the startup in order to initialize the .bss section */
_sbss = .; /* define a global symbol at bss start */
__bss_start__ = _sbss;
*(.bss)
*(.bss*)
*(COMMON)
. = ALIGN(4);
_ebss = .; /* define a global symbol at bss end */
__bss_end__ = _ebss;
} >RAM
/* User_heap_stack section, used to check that there is enough "RAM" Ram type memory left */
._user_heap_stack :
{
. = ALIGN(8);
PROVIDE ( end = . );
PROVIDE ( _end = . );
. = . + _Min_Heap_Size;
. = . + _Min_Stack_Size;
. = ALIGN(8);
} >RAM
/* Remove information from the compiler libraries */
/DISCARD/ :
{
libc.a ( * )
libm.a ( * )
libgcc.a ( * )
}
.ARM.attributes 0 : { *(.ARM.attributes) }
}
2.4 关于core_cm3.c文件
由于gcc编译的问题,如果不更改core_cm3.c,可能出现以下报错:

我对此做出以下两处更改,并放在了/Project/Code-Cmake文件夹下,与MDK-ARM分开:


2.5 配置.vscode文件夹
这是VScode配置文件的位置
2.4.1 添加并配置c_cpp_properties.json
将其C/C++模式更改为gcc-arm,注意将gcc路径替换为自己的路径
{
"configurations": [
{
"name": "Win32",
"includePath": [
"${workspaceFolder}/**"
],
"defines": [
"_DEBUG",
"UNICODE",
"_UNICODE"
],
"compilerPath": "D:\\RJ\\mingw64\\bin\\gcc.exe",
"cStandard": "gnu17",
"cppStandard": "gnu++14",
"intelliSenseMode": "gcc-arm",
"configurationProvider": "ms-vscode.cmake-tools"
}
],
"version": 4
}
2.4.1 添加并配置launch.json
这个文件是关于烧录与调试相关的,在此目录下你可以选择你的下载器型号、芯片型号。其中的stm32f103.svd可以在调试时查看看寄存器的值,请将以下路径改为自己工程的路径。
{
// 使用 IntelliSense 了解相关属性。
// 悬停以查看现有属性的描述。
// 欲了解更多信息,请访问: https://go.microsoft.com/fwlink/?linkid=830387
"version": "0.2.0",
"configurations": [
{
"cwd": "${workspaceRoot}",
"executable": "D:/GC/STM32F1/build/Project.elf",
"name": "Debug with OpenOCD",
"request": "launch",
"type": "cortex-debug",
"servertype": "openocd",
"configFiles": [
"D:/RJ/OpenOCD-20231002-0.12.0/share/openocd/scripts/interface/stlink-v2.cfg", //在OpenOCD选择下载器
"D:/RJ/OpenOCD-20231002-0.12.0/share/openocd/scripts/target/stm32f1x.cfg" //在OpenOCD选择芯片
],
"svdFile": "D:/GC/STM32F1/stm32f103.svd", //选择寄存器文件
}
]
}
三、编译、下载与调试
如果我们配置完成后,用VScode打开CMakeLists.txt所在文件夹工程过后,Cmake tool会自动提示配置Cmake,点击配置后,会生成build文件夹,产生的Makefile及其他中间文件会存放在该目录。

3.1 选择编译器
点击VScode下方的配置按钮,选择gcc-arm

3.2 编译
点击VScode下方的进行编译,生成目标文件

编译过程

在build文件夹下会生成目标文件

3.3 烧录
进入build文件夹下执行以下命令,其中将Project.hex替换为自己的目标文件,stlink-v2.cfg是选择下载器类型,stm32f1x.cfg是芯片型号
openocd -f interface/stlink-v2.cfg -f target/stm32f1x.cfg -c "program Project.hex verify reset exit"
烧录成功

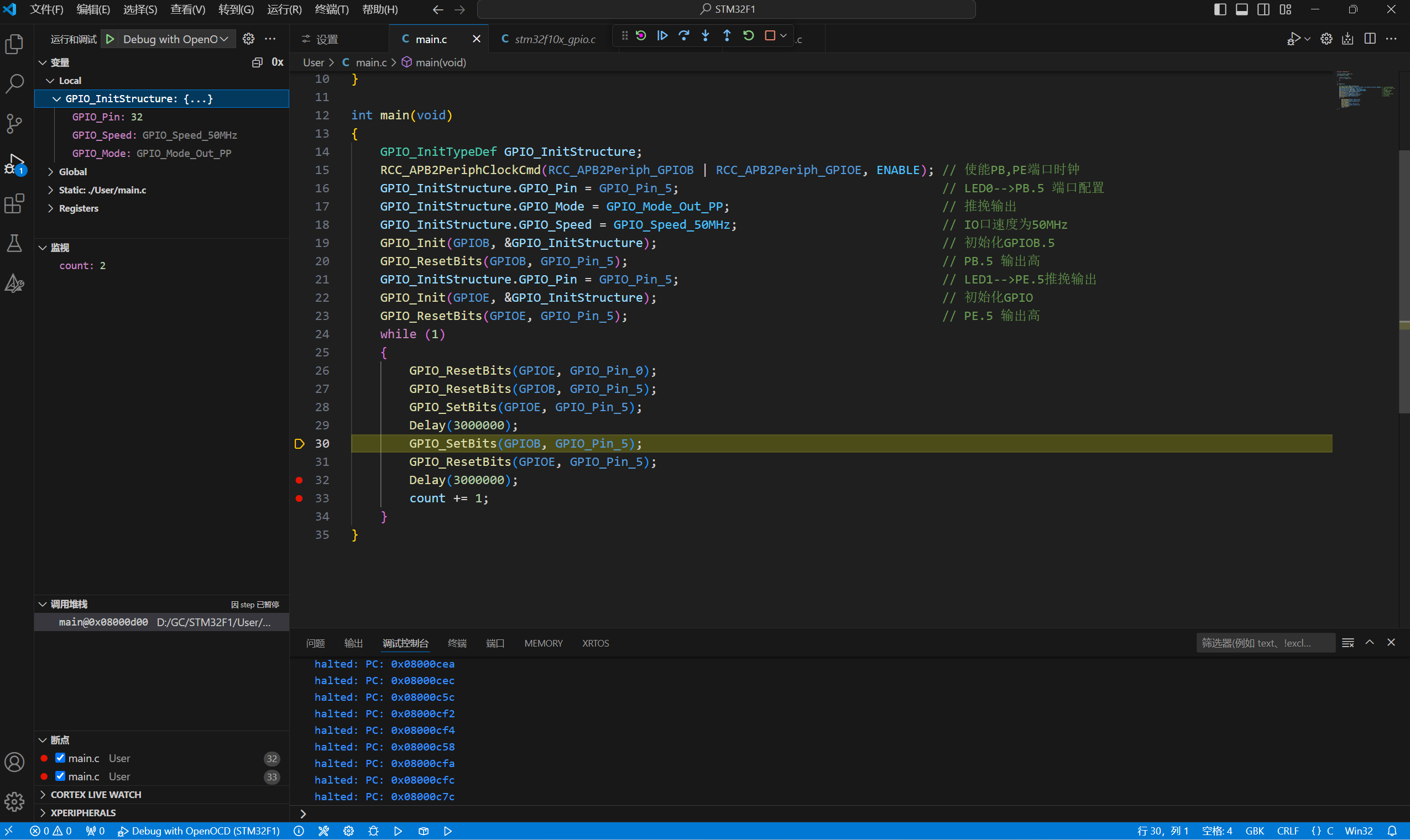
3.3 调试
打开左侧的运行和调试,选择Debug with OpenOCD

点击运行,可进行断点调试,变量监测,寄存器查看等操作。

3.4 关于变量定义
使用gcc编译时,我们一般需要告诉编译器这个变量是可变的,不然会造成内存覆盖,程序无法运行的情况,即voatile关键词

四、参考链接
此文章参考以下文章,若描述不清,可查看下方文章

旨在为数千万中国开发者提供一个无缝且高效的云端环境,以支持学习、使用和贡献开源项目。
更多推荐
 36
36 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)