
2024年电赛H题--自动行驶小车思路分享(三四问)
·
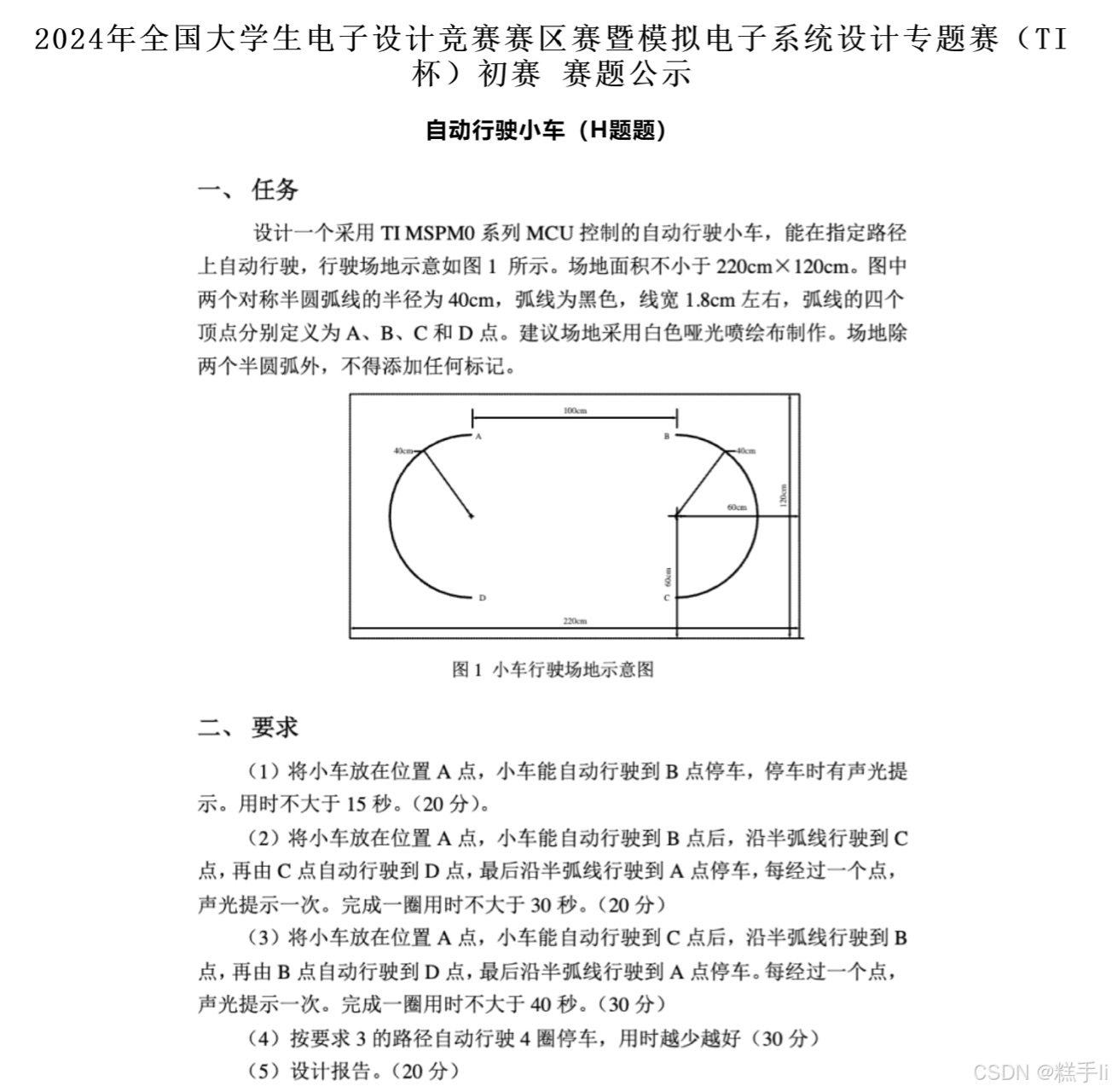
题目

第三问:
按照题目要求,小车从A点走到c点,有两种思路,
思路一:
小车可以按照第二问从A走到B走到C之后转向走到B在转向走向C走向D走向A,这种方案是在第二问的基础上加上转向闭环,在C或B点处转向,利用红外传感器作为反馈,当左边或者右边检测到黑线时停止转向,转向就是左右给相反的PWM值,但这种方案路程长,时间也就长
思路二:
转一定角度后走直线,可以衍生出以下几种方案
方案一:开环转向+位置环
在A点或者B点转向固定角度,利用左右给相反的PWM值,再用编码器脉冲值做限制,即可旋转角度,转向后按照第一问利用位置环走固定距离,停到黑线后开始循迹
方案二:角度环+标志反馈
在A点开机时记住当前陀螺仪的方向角,再在这个值的基础上加减获得目标值,此方法为动态目标值法,使小车移动到固定角度,在利用速度环或角度环前进,当红外检测到黑线时开始巡线(速度不宜过快,过快会冲出,按照实际情况选取),在B点做同样处理
这几种方案要根据实际情况选取更好的一种
第四问:加速第三问
此思路我并没有写具体代码,但思路代码并不难实现,各位请尽情发挥,有更好的方案也可一起探讨,如果实在不会,可接指导(私信)

旨在为数千万中国开发者提供一个无缝且高效的云端环境,以支持学习、使用和贡献开源项目。
更多推荐



 9
9 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)