
记录汇川:运动控制指令-梯形图
使用绝对定位时,首先要确定坐标原点,然后输入绝对位置的坐标,PLC通过输入的坐标,自动识别马达的移动方向,根据输入的坐标值与当前坐标值之间的差值为脉冲数,作为马达移动的距离,最终完成定位;使用相对定位时,输入+和-表示马达移动方向,然后输入移动的脉冲数,PLC会根据使用者设定的+和-来确定马达时正转还是反转,然后以脉冲数为移动距离,完成定位。本指令用于读取EtherCAT总线轴或者本地脉冲轴的反馈
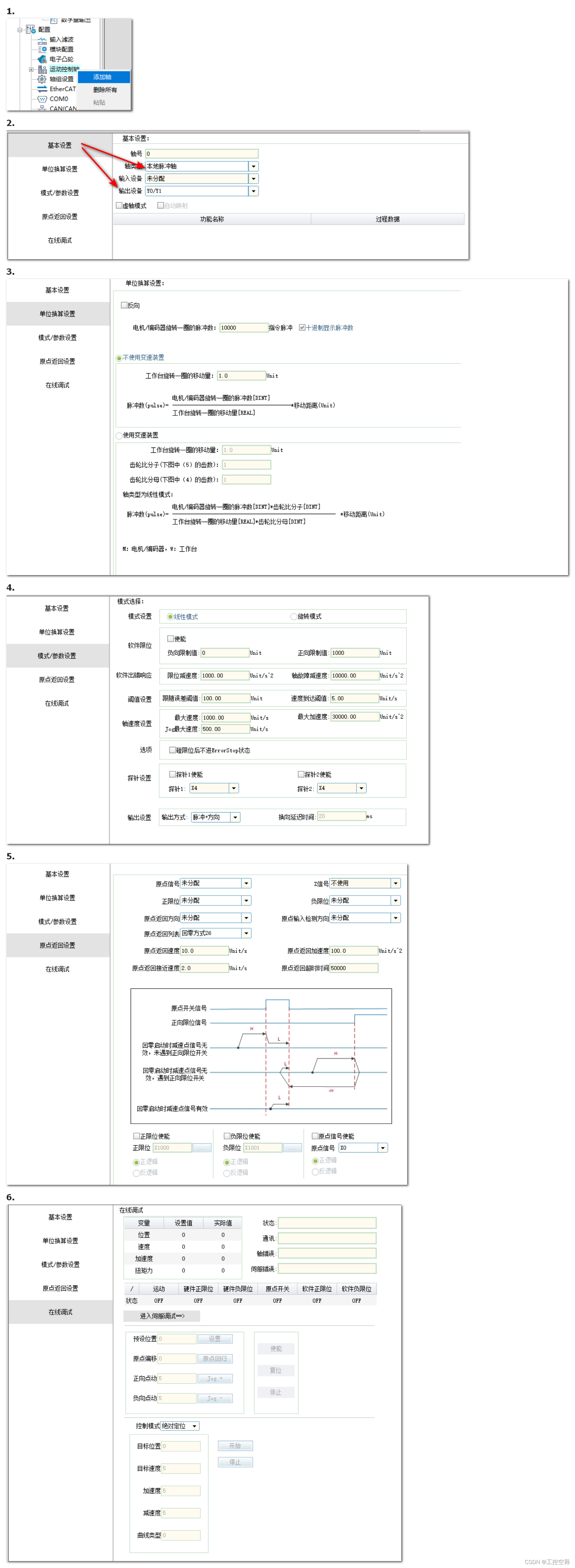
运动轴组态:
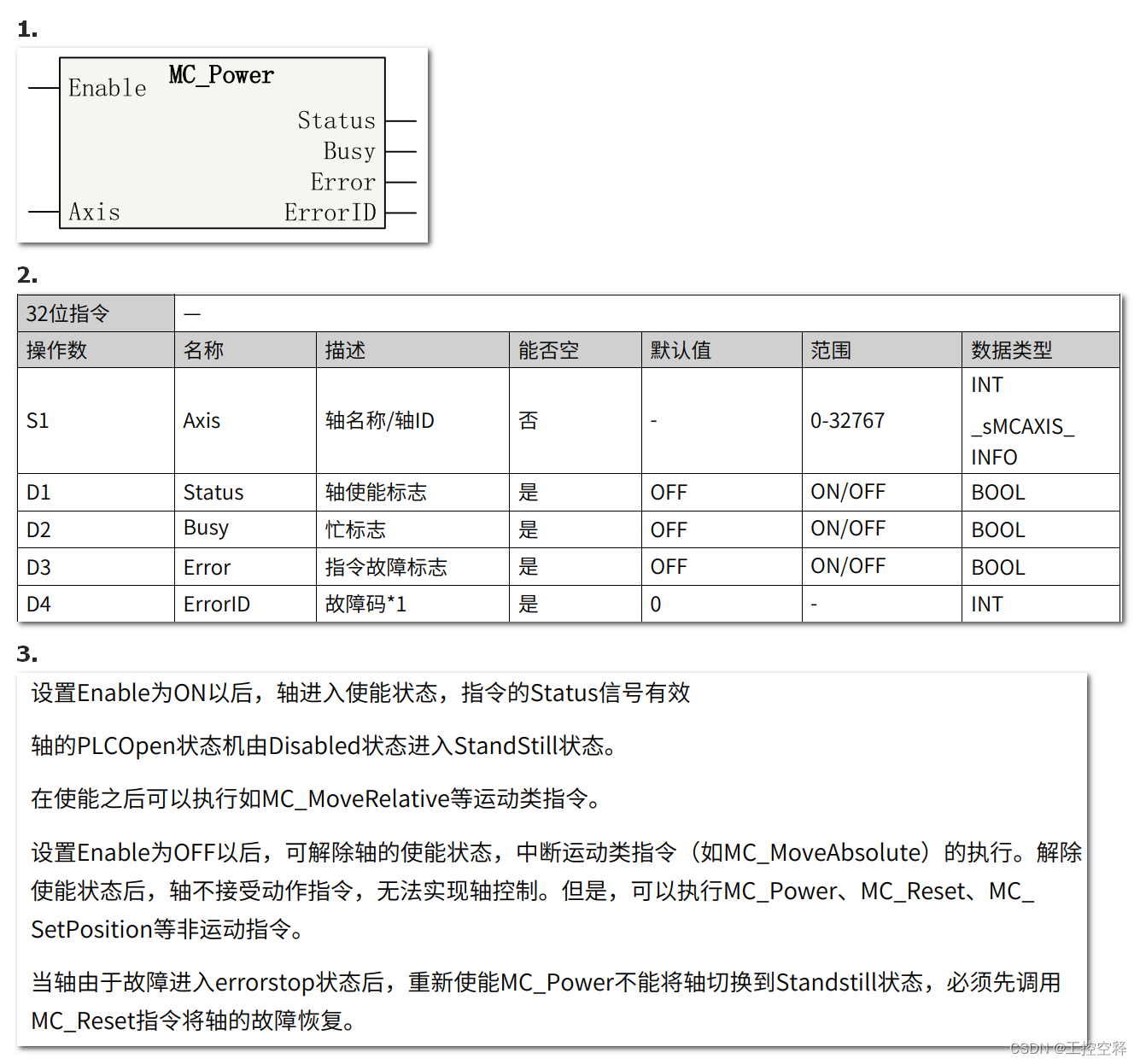
MC_Power — 使能控制指令
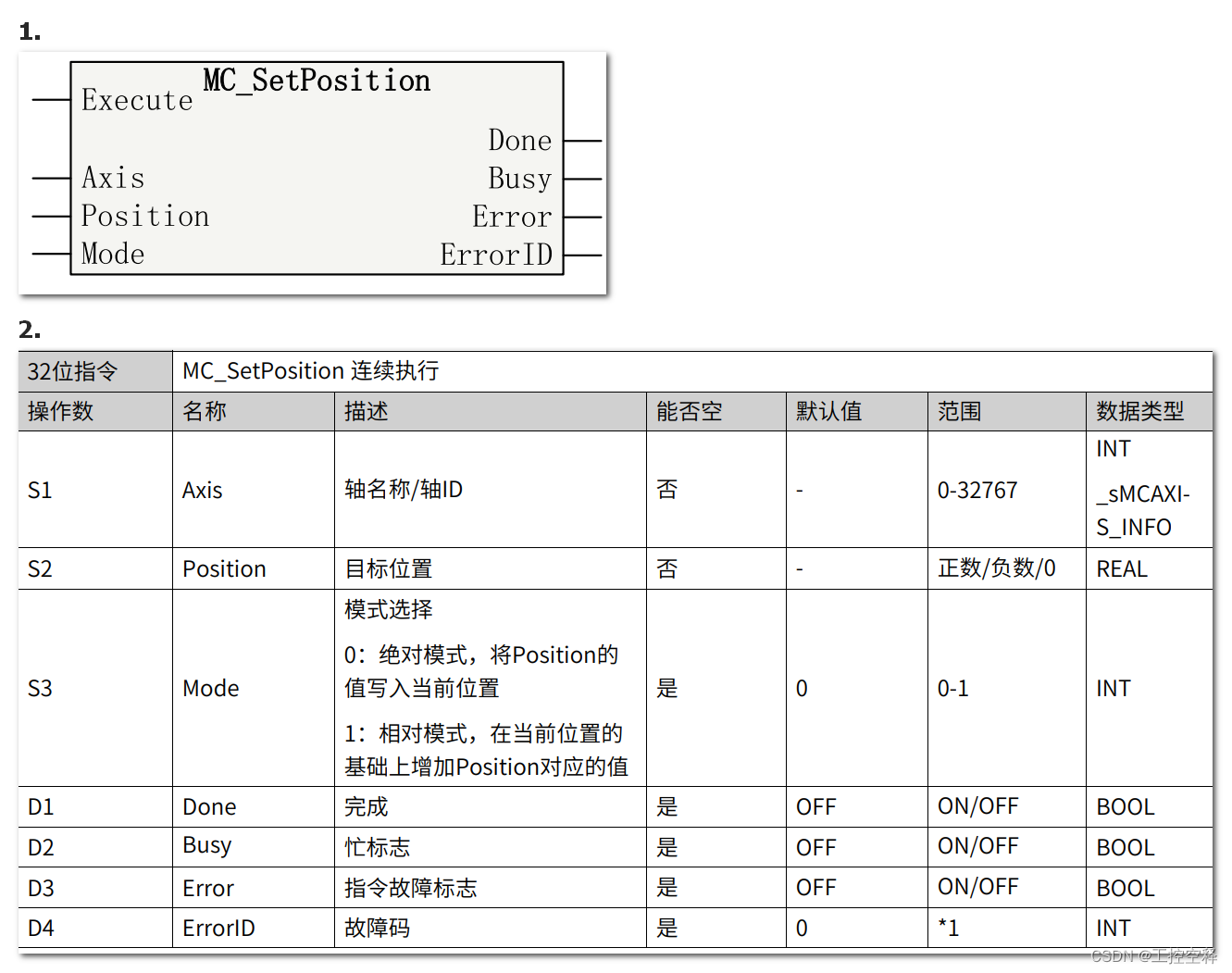
MC_SetPosition — 设置当前位置指令
本指令用于设置EtherCAT总线轴或本地脉冲轴的当前位置,上升沿有效。
只有在轴的PLCOpen状态处于disabled(未使能)、standstilI(使能)和errorstop(故障停机)三种状态才可以调用本执行设置轴的当前位置,其他状态指令报错。
- 当Mode=O(绝对模式)时,在Execute的上升沿,指令将Position写入轴的当前位置。
- 当Mode=1(相对模式)时,在Execute的上升沿,指令在轴的当前位置基础上加上Position。
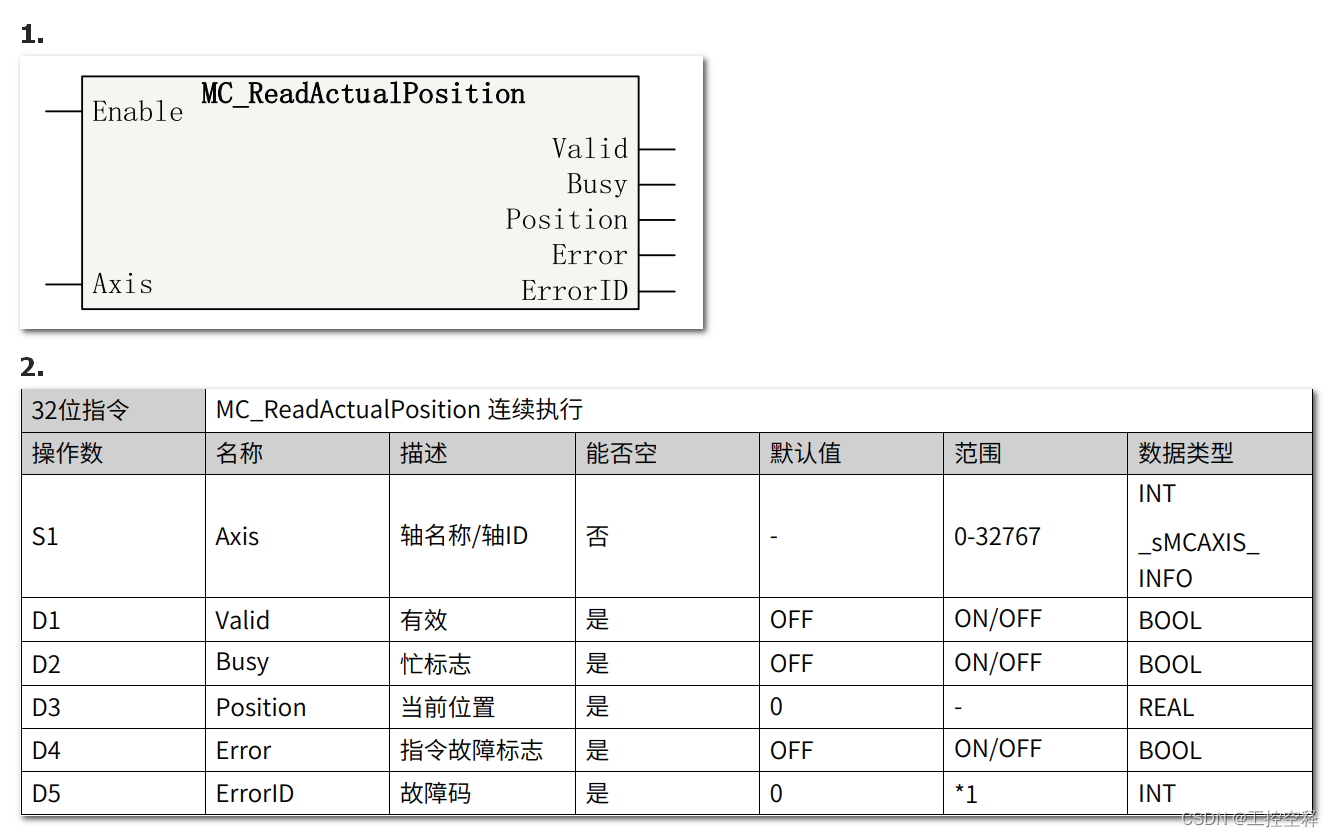
MC_ReadActualPosition — 读取实际位置指令
本指令用于读取EtherCAT总线轴或者本地脉冲轴的反馈位置,高电平有效。
当Enable=ON时,如果EtherCAT总线轴中PDO配置了Ox6064则Valid信号有效,Position显示轴的反馈位置。
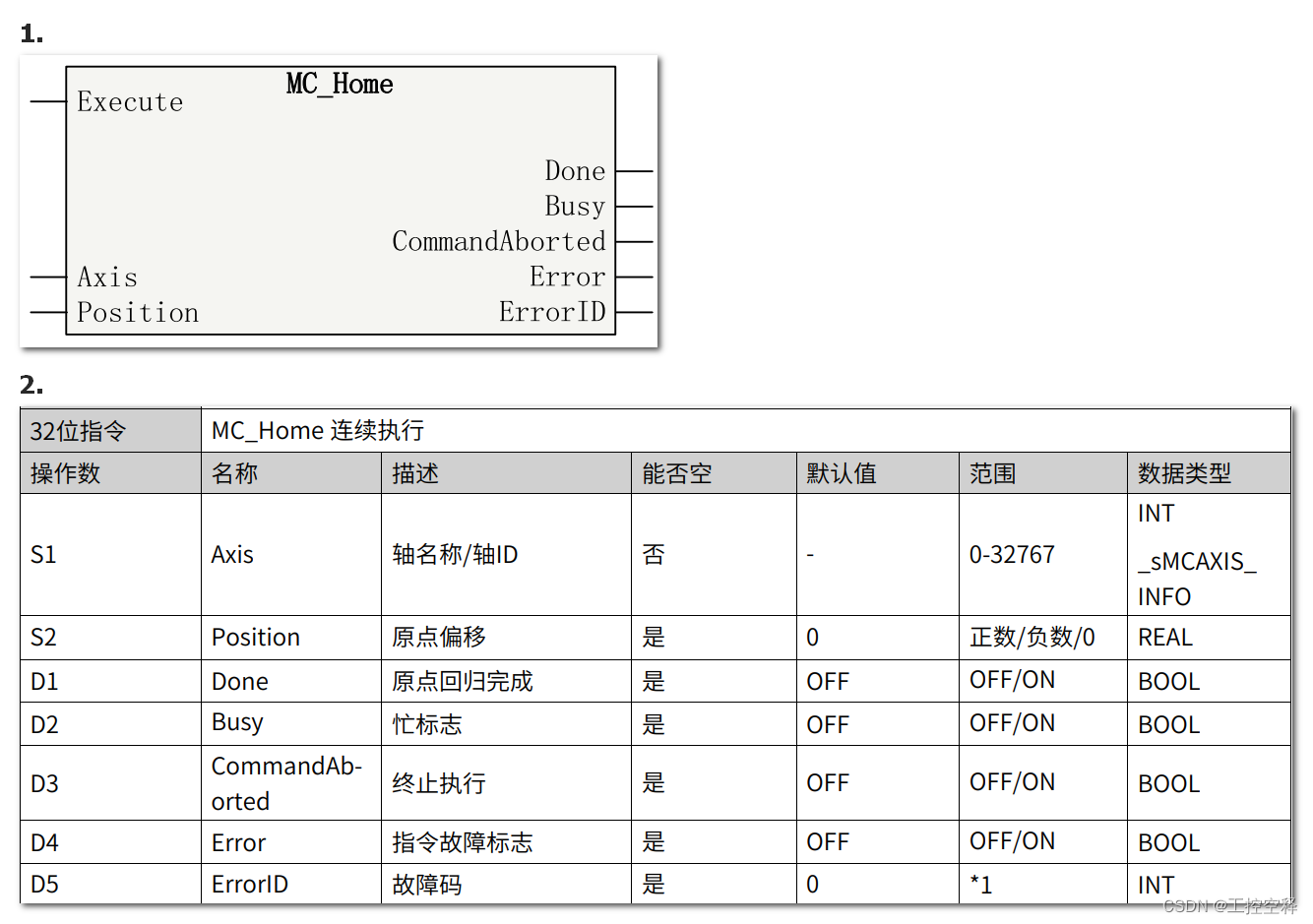
MC_Home — 原点回归指令
- 只有使用MC_Power指令将轴切换到使能状态才可以调用本指令。
- 在指令的上升沿,功能块锁存Position输入参数,轴处于Homing状态并做原点回归运动。Position用于设定原点偏移。
- 回原指令不允许重复调用,当调用一条MC_Home指令使轴处于Homing状态后在调用其他的MC_Home指令,后调用的指令报错。
PLC通过高速脉冲实现的位置控制,分为相对定位与绝对定位。使用绝对定位时,首先要确定坐标原点,然后输入绝对位置的坐标,PLC通过输入的坐标,自动识别马达的移动方向,根据输入的坐标值与当前坐标值之间的差值为脉冲数,作为马达移动的距离,最终完成定位;使用相对定位时,输入+和-表示马达移动方向,然后输入移动的脉冲数,PLC会根据使用者设定的+和-来确定马达时正转还是反转,然后以脉冲数为移动距离,完成定位。
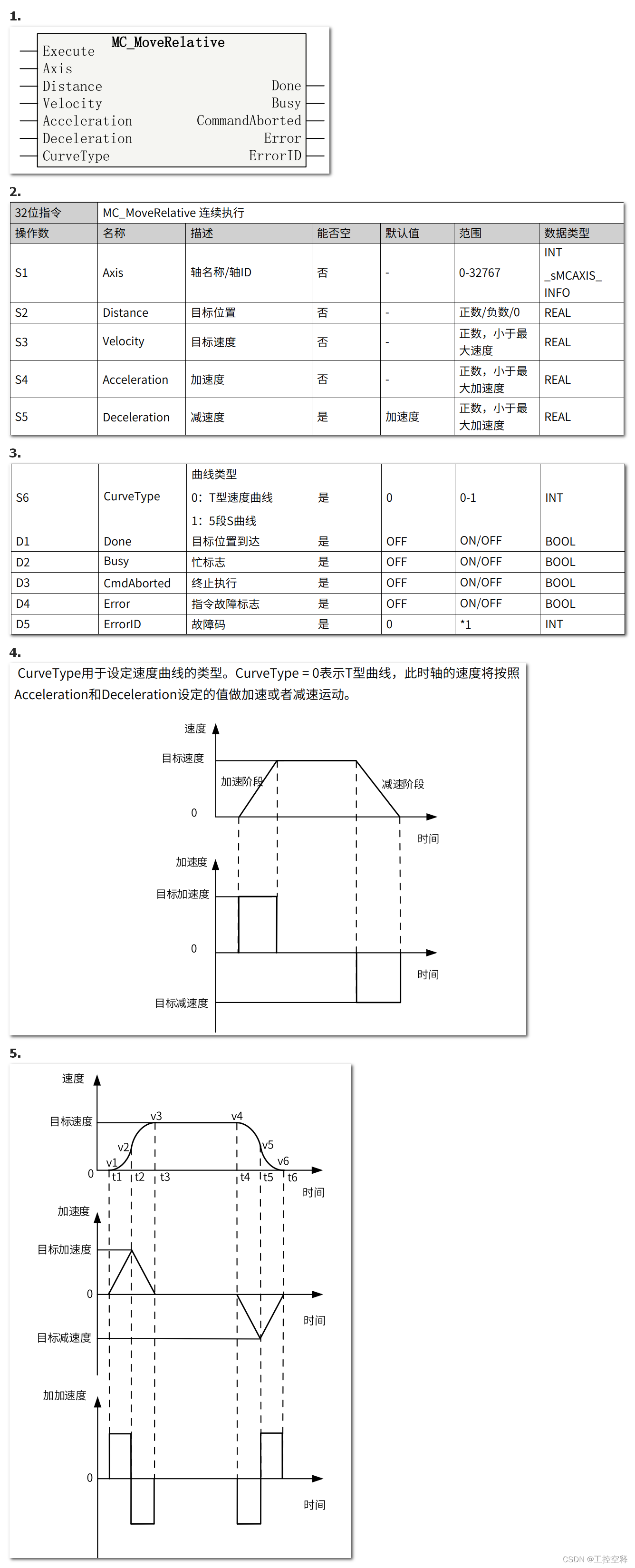
MC_MoveRelative — 相对定位指令
脉冲最大输出频率200KHZ,设定12800个脉冲转一圈,2000000/12800=15.625圈,一圈 2毫米,最大速度可以31.25每秒
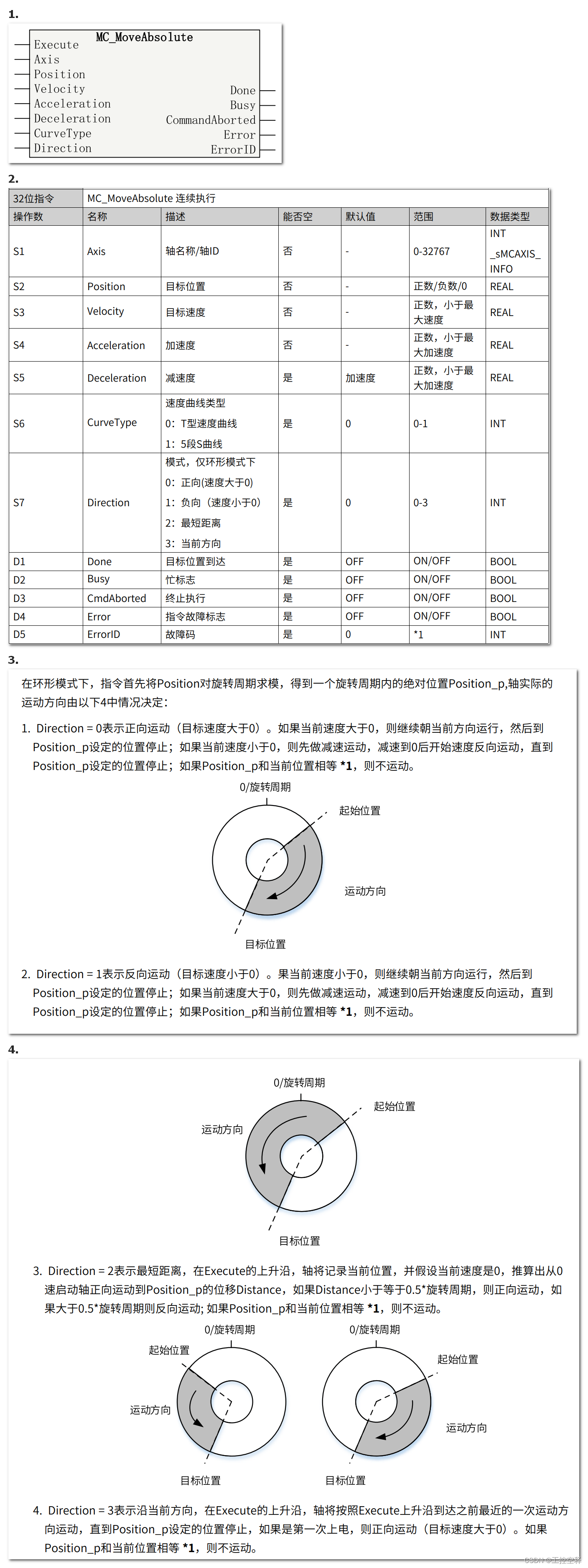
MC_MoveAbsolute — 绝对定位指令
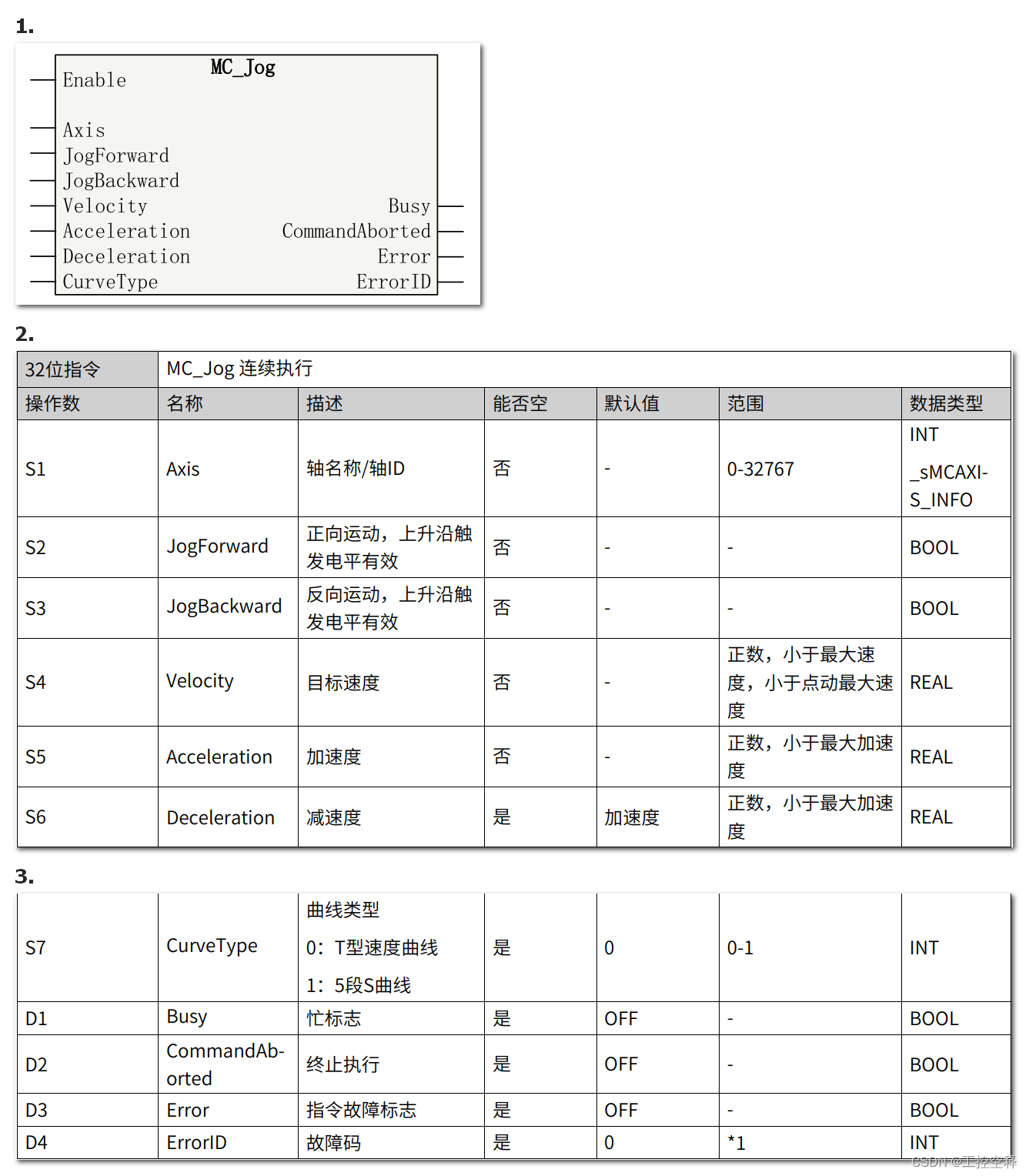
MC_Jog — 点动运动指令
该指令用于实现EtherCAT总线轴或本地脉冲轴的点动功能,高电平有效。
只有使用MCPower指令将轴切换到使能状态才可以调用本指令。
在指令的上升沿,功能块锁存Velocity、Acceleration、Deceleration、CurveType等输入参数,并将轴的状态机切换到ContinuousMotion模式,进入点动状态。
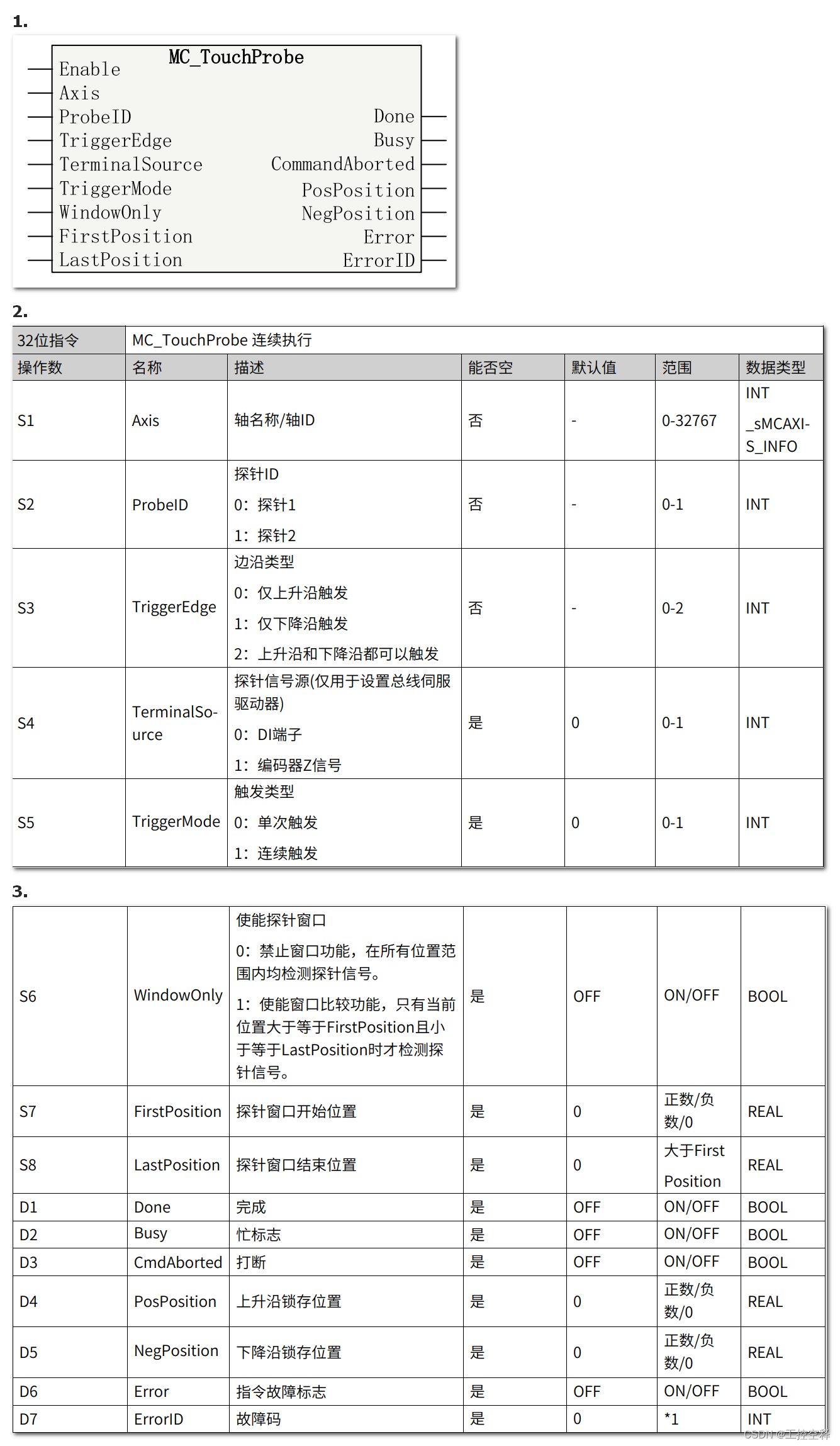
MC_TouchProbe — 探针指令
该指令用于实现EtherCAT总线轴或本地脉冲轴的探针功能,高电平有效。本指令不支持虚轴模式。
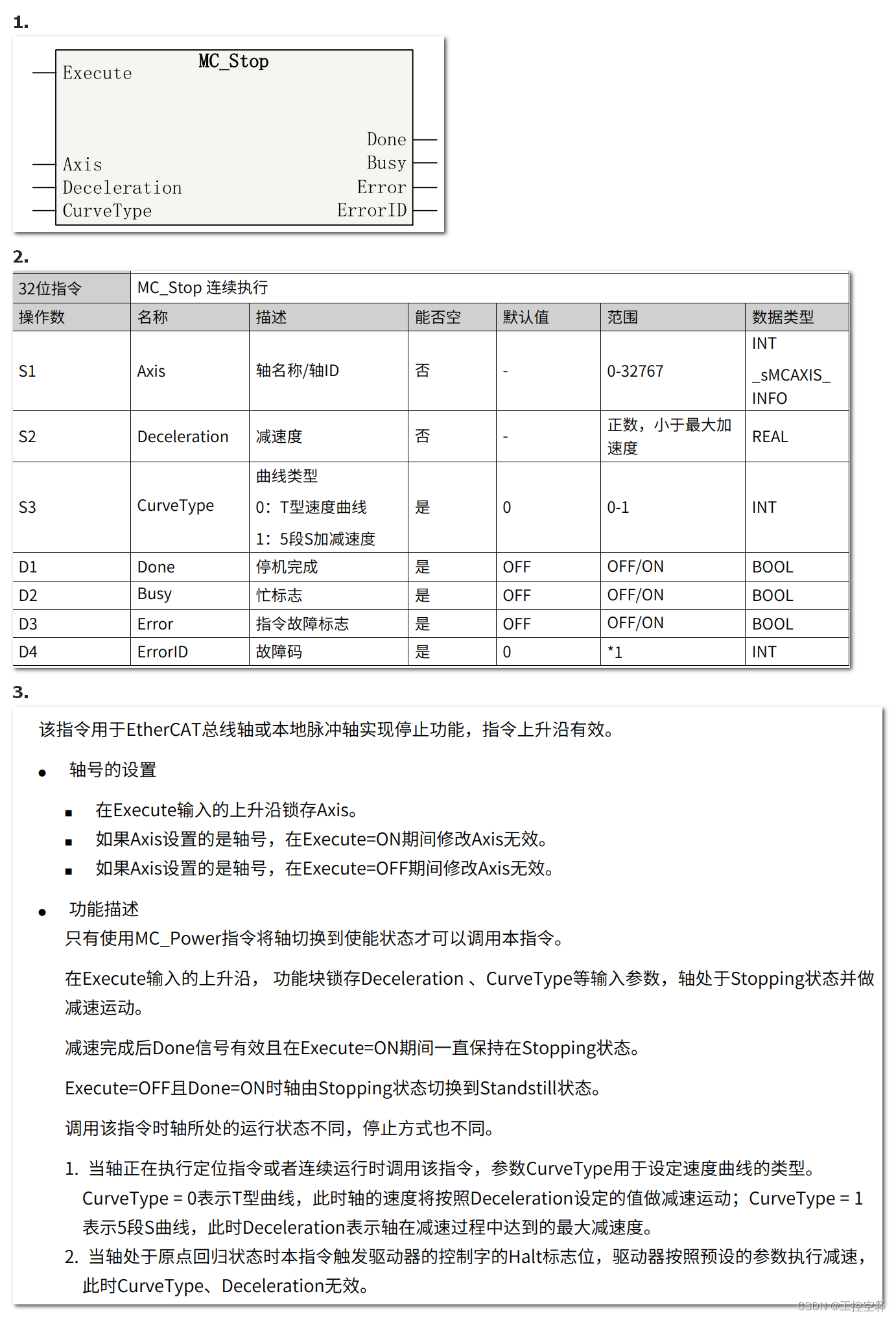
MC_Stop — 停止指令
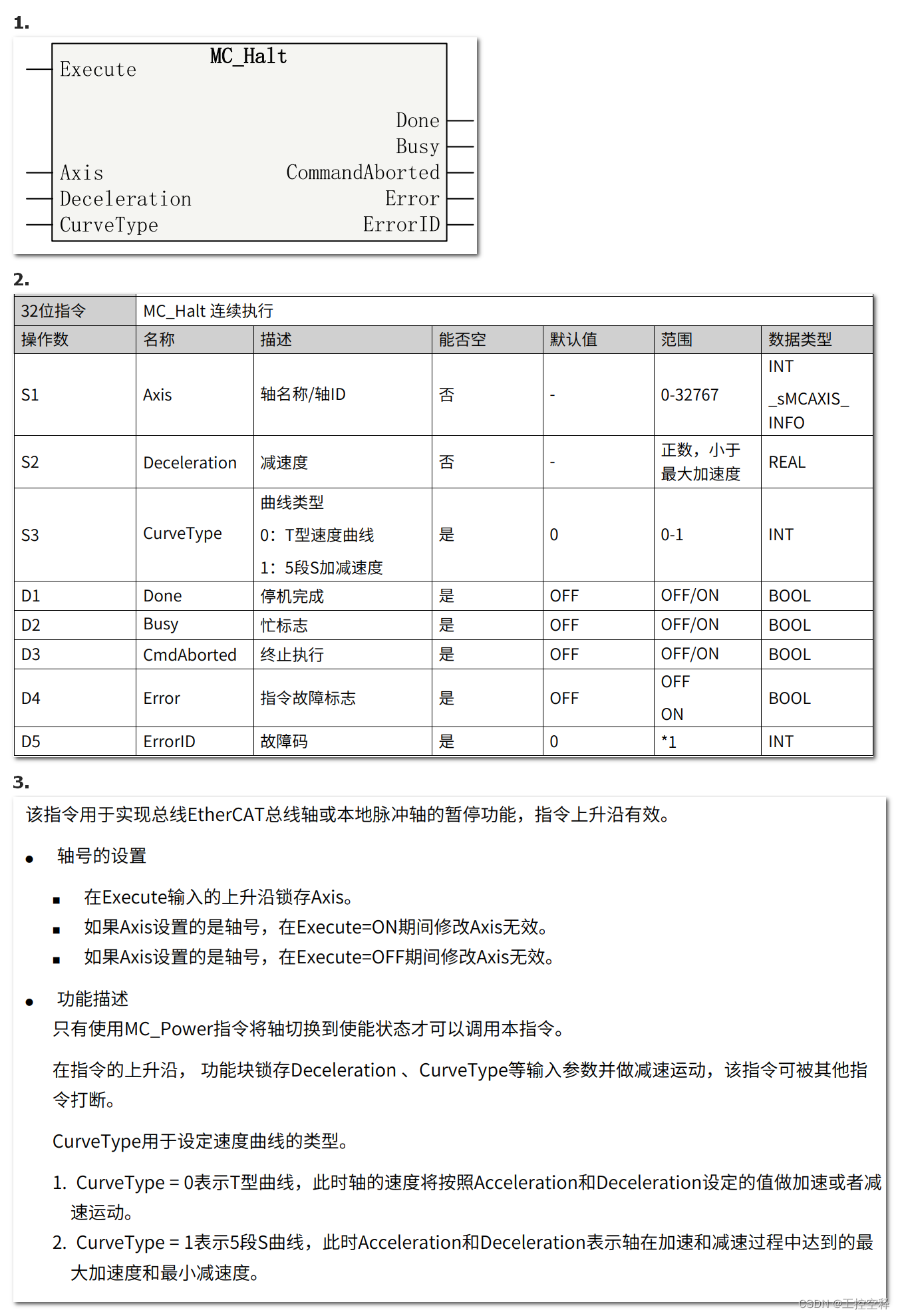
MC_Halt — 暂停指令
无法停止回原点指令的执行
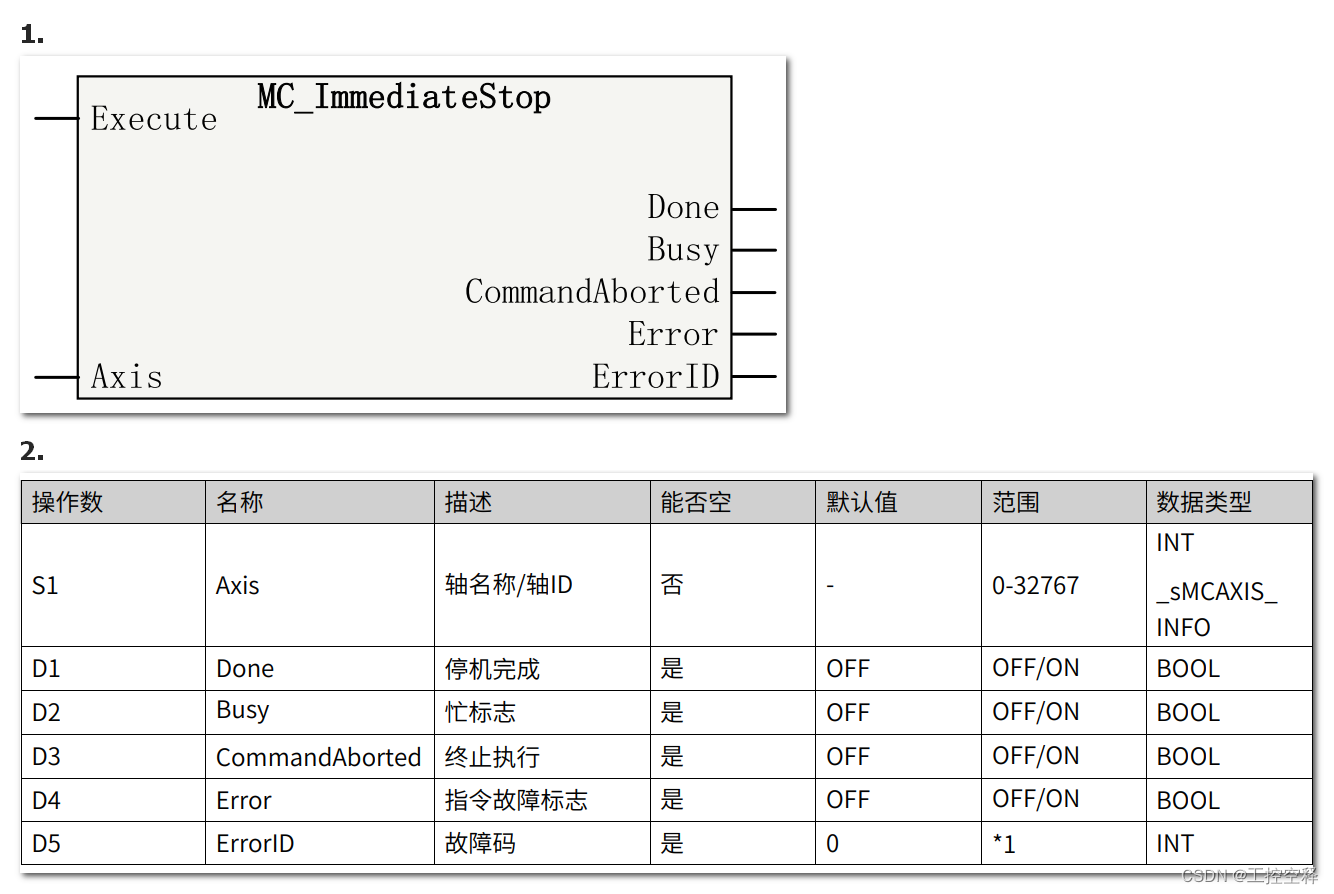
MC_ImmediateStop — 急停指令
该指令用于EtherCAT总线轴或本地脉冲轴实现紧急停止功能,上升沿有效。
优先级最高,只要触发,轴立刻停止
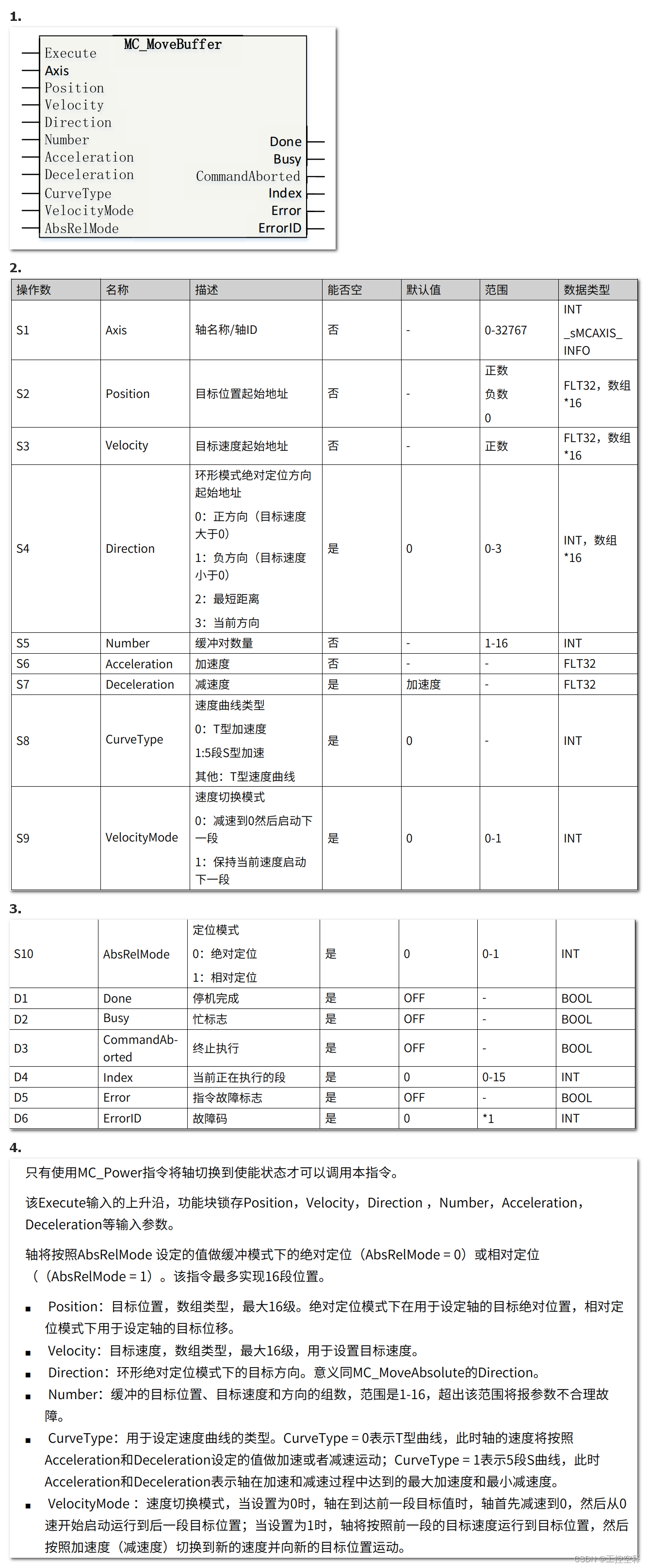
MC_MoveBuffer — 多段位置定位指令
该指令用于实现总线EtherCAT总线轴或本地脉冲轴的多段位置定位功能,上升沿有效。
MC_Reset — 复位故障指令
指令适用于EtherCAT总线轴和本地轴,用于复位轴的故障,上升沿触发
在Execute信号有效的上升沿,指令尝试复位轴的故障,如果复位成功,则Done输出有效,否则Error信号有 效,ErrorID将给出复位失败的原因。 复位成功后,如果驱动器处于使能状态则轴的PLCOpen状态机进入StandStill状态,如果驱动器没有使能则 进入Disabled状态。


旨在为数千万中国开发者提供一个无缝且高效的云端环境,以支持学习、使用和贡献开源项目。
更多推荐



 2
2 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)