
请问PID调节从目标值开始调节,如何消除前面的震荡?
一般来说,可以先单独调节P,使其在不引起震荡的情况下尽可能大。特别是,微分控制作为一种“预测”机制,可以提前对系统的变化作出反应,从而减少震荡。从图像来看,似乎在系统的响应开始时存在一定的震荡。1.减少增益:首先,您可以尝试减少比例增益(P)。5.考虑系统的物理特性:如果已知系统的物理模型或特性,可以使用这些信息来帮助设置PID参数。总的来说,消除PID调节中的震荡需要对控制器进行适当的调整,同时
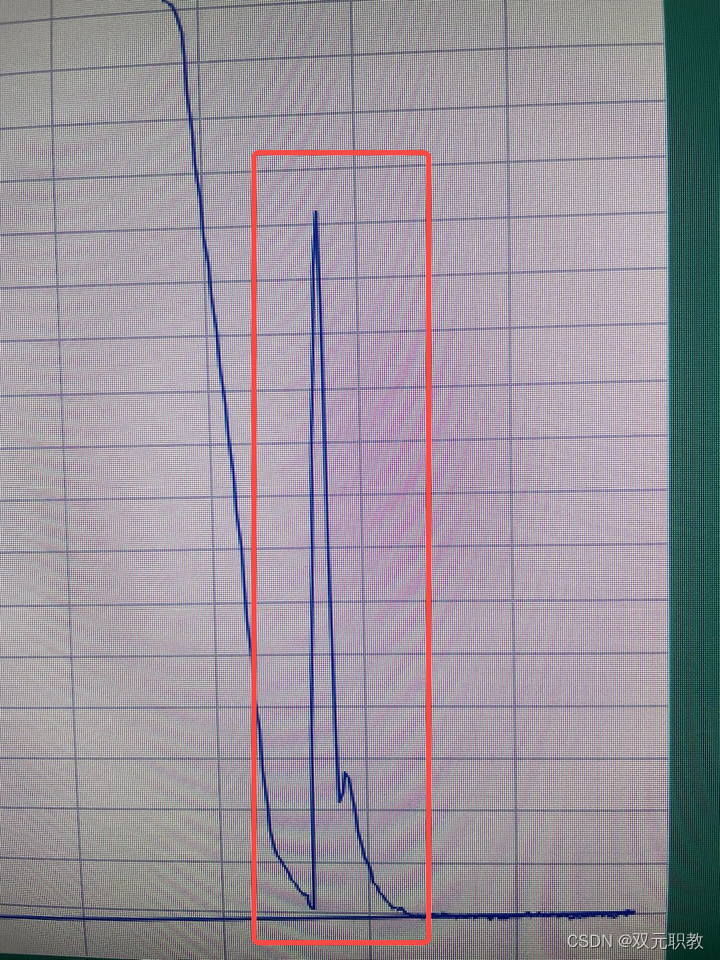
请问PID调节从目标值开始调节,如何消除前面的震荡?如下图:
从图像来看,似乎在系统的响应开始时存在一定的震荡。这些震荡可能是由PID控制参数不适当所导致的。要消除或减小这些震荡,您可以尝试以下方法:
1.减少增益:首先,您可以尝试减少比例增益(P)。过高的比例增益往往会导致系统响应过于剧烈,从而产生震荡。
2.增加阻尼:增加积分(I)和/或微分(D)部分的作用可以帮助减小震荡。特别是,微分控制作为一种“预测”机制,可以提前对系统的变化作出反应,从而减少震荡。
3.手动调节:手动调节PID参数是一个试错的过程。一般来说,可以先单独调节P,使其在不引起震荡的情况下尽可能大。然后,增加D来减少超调和震荡。最后,调整I以减少稳态误差。
4.使用自整定方法:有些控制器提供自整定功能,可以自动为您找到合适的PID参数。
5.考虑系统的物理特性:如果已知系统的物理模型或特性,可以使用这些信息来帮助设置PID参数。
6.使用滤波器:有时,在测量的信号上添加低通滤波器可以帮助减少噪声,从而减少震荡。
7.重新考虑控制策略:如果震荡仍然存在,您可能需要考虑是否使用了合适的控制策略。例如,改用前馈+反馈控制或其他先进的控制策略。
总的来说,消除PID调节中的震荡需要对控制器进行适当的调整,同时确保对系统的理解是正确的。

旨在为数千万中国开发者提供一个无缝且高效的云端环境,以支持学习、使用和贡献开源项目。
更多推荐



 0
0 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)