
学习笔记之——激光雷达SLAM(LOAM系列的复现与学习)
For cooperaive inquiries, please visit the website:guanweipeng.com
目录
LOAM (Lidar Odometry and Mapping in Real-time)
LeGO-LOAM (Lightweight and Ground-Optimized Lidar Odometry and Mapping on Variable Terrain)
LIO-SAM (Tightly-coupled Lidar Inertial Odometry via Smoothing and Mapping)
LVI-SAM (Tightly-coupled Lidar-Visual-Inertial Odometry via Smoothing and Mapping)
概述
激光雷达SLAM
SLAM问题被认为是真正意义上实现机器人自主移动的关键。其问题可以理解为如下的生活问题。
当你来到一个陌生的环境时,为了迅速熟悉环境并完成自己的任务(比如找饭馆,找旅馆),你应当做以下事情:
-
a.用眼睛观察周围地标如建筑、大树、花坛等,并记住他们的特征(特征提取)
-
b.在自己的脑海中,根据双目获得的信息,把特征地标在三维地图中重建出来(三维重建)
-
c.当自己在行走时,不断获取新的特征地标,并且校正自己头脑中的地图模型(
bundle adjustment or EKF) -
d.根据自己前一段时间行走获得的特征地标,确定自己的位置(
trajectory) -
e.当无意中走了很长一段路的时候,和脑海中的以往地标进行匹配,看一看是否走回了原路(
loop-closure detection)。实际这一步可有可无。
以上五步是同时进行的,因此是simultaneous localization and mapping。
目前用在SLAM上的Sensor主要分两大类,激光雷达和摄像头。


由于Sensor和需求的不同,SLAM的呈现形式略有差异。大致可以分为激光SLAM(也分2D和3D)和视觉SLAM(也分Sparse、semiDense、Dense)两类,但其主要思路大同小异。
SLAM算法在实现的时候主要要考虑以下4个方面吧:
-
地图表示问题,比如dense和sparse都是它的不同表达方式,这个需要根据实际场景需求去抉择
-
信息感知问题,需要考虑如何全面的感知这个环境,RGBD摄像头FOV通常比较小,但激光雷达比较大
-
数据关联问题,不同的sensor的数据类型、时间戳、坐标系表达方式各有不同,需要统一处理
-
定位与构图问题,就是指怎么实现位姿估计和建模,这里面涉及到很多数学问题,物理模型建立,状态估计和优化
其他的还有回环检测问题,探索问题(exploration),以及绑架问题(kidnapping)。
本博文主要学习激光雷达SLAM,激光雷达传感器利用光原理进行工作,激光雷达代表光探测和测距。它们可以探测到300米以内的障碍物,并准确估计它们的位置。在自动驾驶汽车中,这是用于位置估计的最精确的传感器。

激光雷达传感器由两部分组成:激光发射(顶部)和激光接收(底部)。发射系统的工作原理是利用多层激光束,层数越多,激光雷达就越精确。层数越多,传感器就越大。激光被发射到障碍物并反射,当这些激光击中障碍物时,它们会产生一组点云,传感器与飞行时间(TOF)进行工作,从本质上说,它测量的是每束激光反射回来所需的时间。如下图:

当激光雷达的质量和价格非常高时,激光雷达是可以创建丰富的三维环境,并且每秒最多可以发射200万个点。点云表示三维世界激光雷达传感器获得每个撞击点的精确(X,Y,Z)位置。

激光雷达传感器可以是固态的,也可以是旋转的,固态激光雷达将把检测的重点放在一个位置上,并提供一个覆盖范围(比如FOV为90° )。在后一种情况下,它将围绕自身旋转,并提供360度旋转。在这种情况下,一般把它放在设备顶上,以提高能见度。
激光雷达很少用作独立传感器。它们通常与相机或雷达结合在一起,这一过程称为传感器融合。融合过程可分为早期融合和后期融合。早期融合是指点云与图像像素融合,后期融合是指单个检测物的融合。
激光雷达进行障碍物的步骤通常分为4个步骤:
-
点云处理
-
点云分割
-
障碍聚类
-
边界框拟合
为了处理点云,我们可以使用最流行的库PCL(point cloud library)。它在Python中可用,但是在C++中使用它更为合理,因为语言更适合机器人学。它也符合ROS(机器人操作系统)。PCL库可以完成探测障碍物所需的大部分计算,从加载点到执行算法。这个库相当于OpenCV的计算机视觉。因为激光雷达的输出很容易达到每秒100000个点,所以我们需要使用一种称为体素网格的方法来对点云进行下采样。体素网格是一个三维立方体,通过每个立方体只留下一个点来过滤点云。立方体越大,点云的最终分辨率越低。最终,我们可以将点云的采样从几万点减少到几千点。

滤波完成后我们可以进行的第二个操作是ROI(感兴趣区域)的提取,我们只需删除不属于特定区域的每一些点云数据,例如左右距离10米以上的点云,前后超过100米的点云都通过滤波器滤除。现在我们有了降采样并滤波后的点云了,此时可以继续进行点云的分割、聚类和边界框实现。
点云分割任务是将场景与其中的障碍物分离开来,其实就是地面的分割。一种非常流行的分割方法称为RANSAC(RANdom Sample consenses)。该算法的目标是识别一组点中的异常值。点云的输出通常表示一些形状。有些形状表示障碍物,有些只是表示地面上的反射。RANSAC的目标是识别这些点,并通过拟合平面或直线将它们与其他点分开。
 为了拟合直线,我们可以考虑线性回归。但是有这么多的异常值,线性回归会试图平均结果,而得出错误的拟合结果,与线性回归相反,这里的ransac算法将识别这些异常值,且不会拟合它们。
为了拟合直线,我们可以考虑线性回归。但是有这么多的异常值,线性回归会试图平均结果,而得出错误的拟合结果,与线性回归相反,这里的ransac算法将识别这些异常值,且不会拟合它们。
如上图所示我们可以将这条线视为场景的目标路径(即道路),而孤立点则是障碍物。它是如何工作的?
过程如下:
-
随机选取2个点
-
将线性模型拟合到这些点计算每隔一点到拟合线的距离。如果距离在定义的阈值距离公差范围内,则将该点添加到内联线列表中。
因此需要算法一个参数:距离阈值。
最后选择内点最多的迭代作为模型;其余的都是离群值。这样,我们就可以把每一个内点视为道路的一部分,把每一个外点视为障碍的一部分。RANSAC应用在3D点云中。在这种情况下,3个点之间的构成的平面是算法的基础。然后计算点到平面的距离。
下面点云上RANSAC算法的结果。紫色区域代表车辆。

RANSAC是一个非常强大和简单的点云分割算法。它试图找到属于同一形状的点云和不属于同一形状的点云,然后将其分开。
激光雷达从2D到3D(Cartographer)
之前博客《ROS实验笔记之——基于cartographer方法的SLAM》基于Cartographer的2D SLAM。实际上,Cartographer支持2D和3D激光雷达的输入,实现机器人定位,并构建栅格地图。
- Cartographer是由谷歌于2016年开源的一个支持ROS的室内SLAM库,并在截至目前为止,仍然处于不断的更新维护之中。
- 特点:代码极为工程,多态、继承、层层封装的十分完善。提供了方便的接口,便于接入IMU、(单/多线)雷达、里程计、甚至为二维码辅助等视觉识别方式也预留了接口(Landmark)。
2D-SLAM:基于2D栅格地图,可以直接用于导航。
3D-SLAM:基于hybridGrid,译为混合概率地图,可以理解为3D栅格地图。 明确:RViz 仅显示3D混合概率网格的2D 投影(以灰度形式)。该地图难以直接使用。
在Cartographer前端中,不断维护的是scan和submap之间的位姿。整个的map是由一个个submap组成的。
Cartographer的匹配方法
Cartographer采用的是scan-map的匹配方法。 一般情况的SLAM有如下三种:
- scan-scan: 这个意味着利用两帧激光数据(每帧激光束的数目相同),计算二者之间的变换。典型方法:ICP。
- scan-map: 利用一帧激光数据和地图数据,找到激光数据在地图中的位置。
- map-map: 利用一个子地图数据,在一个更大的地图中找到它合适的位置。
不管是2D还是3D,首先要有一个初始的位姿,在此基础上进行优化:
- 有IMU,则采纳其角速度积分作为初始姿态。不信任IMU任何加速度信息。
- 有里程计,则采纳里程计的线速度积分作为初始平移。
- 二者都没有,根据之前的运动做一个匀速的假设。
注意,cartographer的多传感器融合是一个松耦合,主要依赖激光来定位。IMU和里程计数据并没有被构建到真正优化的目标函数中。
在得到了初始位姿以后,初始位姿要经过第一阶段解算:CSM(Correlation Scan Match 相关扫描匹配)——构建似然场。即对原先的地图map进行一个高斯模糊,让它膨胀一些,然后把激光scan在一个搜索窗口内暴力匹配,计算得分。注意,这里有两个问题:
1.得分怎么算?
- 如果scan的点落在障碍物模糊区域内,落的越多,得分越高。
2.地图不是无限大的吗,你怎么保证在搜索窗口里就能找到位姿呢?
- 因为有初始位姿。误差肯定在一个范围内而不会马上发散到很远,所以可以在一个位姿的窗口内,对位姿进行暴力匹配搜索。(初始位姿估计中,里程计数据不会突然激增;imu的加速度信息会漂移,但是算法对于imu加速度数据选择直接丢弃不看;而根据之前位姿匀速假设也不会飘走)
这时候我们就要考虑,什么是位姿?位置+姿态。对于2Dslam而言,有三个变量,x,y,yaw角。 对于3Dslam而言,有x,y,z,roll,pitch,yaw六个变量。
- 2dslam中,采用三层循环,(最外层为θ,减小sin和cos的频繁计算),对x,y,θ在给定大小的搜索窗口内进行穷举,计算最高得分的x,y,θ作为一阶段解算的输出位姿。
- 3dslam中,采用六层循环,对x,y,z,roll,pitch,yaw六个变量在搜索窗口内穷举,计算得分最高的作为一阶段解算输出位姿。 很显然,3d-slam的这种方式对于计算资源依赖较大,复杂度达到O(n^6)级别。因此3d-slam的CSM方法,作为一个配置选项,默认是不开启的。当然如果用户机器比较牛逼,也可以选择开启。
第一阶段CSM解算中,位姿在其中是一个离散的变量,通过暴力枚举获得输出结果;但是暴力枚举也是存在分辨率的,例如:如果角度步长设为1度,但如果刚好真正的角度是5.5度,那么CSM只能搜索到5或6度,而无法进一步细化,逐步累积将会造成误差。 因此,引入第二阶段位姿解算:非线性优化。

Si(T)表示把激光数据S用位姿T进行转换,M(x)表示得到坐标x的地图占用概率。思路:S代表了激光击中障碍物,将激光点在机器人坐标系下的位置,经过T转换到世界坐标系下以后,应该尽可能的落在已有地图的障碍物上。
第二阶段的位姿求解,显然位姿在其中是一个连续的变量,通过梯度下降的方法求解目标函数。由于地图是离散的,因此需要对地图进行插值处理,使地图也变成一个可以求导的连续变量,这样才能优化前述目标函数。

线性插值:已知数据 (x0, y0) 与 (x1, y1),要计算 [x0, x1] 区间内某一位置 x 在直线上的y值;
双线性插值本质上就是在两个方向上做线性插值。 双三次插值:更加复杂的插值方式,它能创造出比双线性插值更平滑的图像边缘。使用最近16个点插值。
Cartographer的建图方法
Cartographer的地图(map)以子地图(submap)的形式组成。分为前端和后端。 前端:根据帧间匹配算法(scan-match),实时根据激光(scan)来推测累积的scan相对于submap的位姿。 后端:检测回环(发现在已到达的位置附近),修正各个submap之间的位姿。根据代码可以判断,2D和3D基于的是同一套思路,但是在实现上有一定区别。 接下来结合2D和3D部分,对比介绍实现定位和建图的方法。
在介绍定位和建图思路之前,先介绍一下地图的更新方式:

以方格代表地图块,内部存储数据用来表示被占据的概率。 发出一束激光,打到一个障碍物点,被打到的称为hit点,中间连线上的空区域,称为miss点。 2d和3d都是存储的这样的地图。3d相当于是3维的栅格地图。宏观上:多次观测到,提升其概率。 问题是,如何用公式表达这个“多次观测”来实现“概率提升”?如下所示

- p表示占据概率,当p=0.5时,概率比值odds=1,表示占据和空闲各占一半。odds^-1表示函数逆运算。
- p_hit=0.55代表该位置被激光打到一次的概率,第一次观测会被直接赋值。
- M(x)表示地图中x位置处的概率值。
举例:
- 初始时刻,栅格未知状态,激光第一次打到了位置x处,M(x)概率更新为0.55。
- 随后,激光第二次重复打到了同一个位置: odd(p_hit)=0.55/(1-0.55)=1.22, odds(M_old(x))=odds(0.55)=1.22 odd(p_hit)和odds(M_old(x))相乘为1.484,再求函数逆运算,恢复出更新后的M_new(x)=0.597。
Cartographer的后端
Cartographer在后端主要寻找回环,并根据建立的约束对所有的sumap进行统一优化。 回环检测目的是:检测当前位置是否曾经来过,即采用当前scan在历史中搜索,确认是否匹配。
为什么要有回环检测呢?原因有二:1. 已有地图时位姿初始化,不知道当前帧初始位姿,也就不清楚在地图中哪个位置,无法做定位。 2.有累积误差,仅靠前端递推,不进行修正的话,地图很容易变形。因此接下来我们探讨两个问题:1.如何检测回环。2.检测回环后该怎么做。
如何检测回环
检测回环和前端的思路也比较相似,先通过穷举暴力匹配,再通过优化精细修正。但是,前端的暴力穷举,是在有个初始位姿的基础上在一个小窗口内穷举。 后端重定位,没有初始位姿了,暴力匹配的范围变成了整个地图。 因此必须采用算法加速处理:多分辨率地图+分枝定界操作。
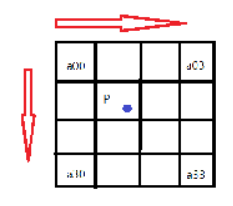
假设有一帧激光:
蓝色代表障碍物:

在高分辨率的地图上,四个点命中3个;在低分辨率的地图上,四个点全部命中。激光在低分辨率的地图上匹配情况: 代表得分的上界 (再往精细展开,匹配得分只能更低,不能更高) 在高分辨率的地图上匹配情况: 代表得分的下界( 再往粗略缩放,匹配得分只能更高,不会更低)
分支定界:
- 先把整个地图中的一个区域展开到底(最高分辨率),得到一个匹配分数(得分下界);
- 然后把其他区域不展开,算匹配分数。(得分上界)
- 如果低分辨率区域的得分上界,还没有已展开到底的高分辨率区域的下界高,这个低分辨率区域就不再展开了,统统丢掉不要。

左图四个命中3个,得分75; 右图四个命中2个,得分50; 那么激光打在子区域A的可能性就要大于B,因此B就无需继续展开成更精细的地图了。
- 2D-slam的思路比较简单 前端:小范围内穷举+非线性优化方法修正位姿。 回环检测:大范围内穷举(利用分支定界加速) +非线性优化修正位姿。
- 3D-slam有所不同。 前端的暴力匹配方法,是直接6层循环暴力枚举的,因此配置文件中默认不开启,而是在初始通过IMU、里程计等预测位姿基础上,直接非线性优化修正位姿。 如果回环检测仍然是:大范围内6个循环穷举+分支定界的话,小范围都嫌慢,大范围更别提。 直接对位姿非线性优化? 1.没有初值,会算到猴年马月。2.会落入局部最优值。
回环检测后,就到优化了~而优化的本质,还是一个最小二乘问题。
LOAM (Lidar Odometry and Mapping in Real-time)
LOAM是Ji Zhang早期开源的多线LiDAR SLAM算法。该代码可读性很差,作者后来将其闭源。其效果如下:
上文介绍的cartographer主要解决室内问题,LOAM室内外都可以,但是没有回环检测。Cartographer的3D部分,更像是2D的扩展:即用2D的思路去做3D的事情。而LOAM则主要解决3D问题,其核心思路难以解决2D问题。虽然该算法发表于14年RSS,但是在KITTI上的Odometry模块(The KITTI Vision Benchmark Suite)的激光SLAM排行榜上,仍然霸占前列。

由于LOAM的工程已经闭源。本博文在此处采用下面两个github工程来查看LOAM的效果~
其框架如下图所示

- Point Cloud Registration:点云不是同一时刻获取的,每一个帧点云,其中的每一个点,都是不同时刻获取的,因此把它进行运动补偿: 获取每个点的时间戳,位姿插值,把点云先投影到同一时刻;提取特征点。
- Lidar Odometry: 估计两帧点云之间的位姿变换,获得两个时刻之间的相对位姿,频率较高 10Hz
- Lidar Mapping: 建图模块,把连续10帧的点云数据和整个地图匹配,获得世界坐标系下的位姿,频率较低 1Hz。
- Transform Intergration:实时利用世界坐标系下的位姿和两个时刻之间的相对位姿,更新各个时刻世界坐标系下的位姿。
Cartographer使用栅格地图,地图中存储着占据概率,通过把点云投影到栅格地图,计算匹配得分,找到最合适的投影,作为位姿变换。但是,LOAM使用的是点云地图,那么点云投影后,进行匹配的就还是点云地图。 两堆点云,如何匹配?
传统方法,使用ICP方法,即默认两堆点云中最近的点是匹配点,构建矩阵进行奇异值分解,得到变换矩阵后投影点云,然后再次寻找匹配点,重新计算投影……直至收敛。然而,对SLAM算法而言,要求同步定位和建图。这样随便根据距离选匹配点,计算太复杂,可能算来算去都不收敛,压根就不能实时,计算量实在是太大了。LOAM作者决定对点云提取特征,然后根据稀疏的特征来计算位姿变换。 作者决定提取两种特征点:平面点和边缘点。
对于平面点与边缘点,作者引入曲率计算方法
计算曲率听起来是一个很麻烦的事情,在高等数学中,一条曲线的曲率以如下公式进行计算:
但事实上作者并不是这样算的。他直接利用激光的每条扫瞄线中,一个点前后各五个点,计算平均值到该点的距离。

直观理解如下图示

- 平面点:在三维空间中处于平滑平面上的点,其和周围点的大小差距不大,曲率较低,平滑度较低。
- 边缘点:在三维空间中处于尖锐边缘上的点,其和周围点的大小差距较大,曲率较高,平滑度较高。
作者对整个扫描进行分段,分四段,每段各取2个边缘点和4个平面点。在确定了边缘点和平面点后,两帧点云将根据这两种特征点进行运动估计。
边缘点匹配方法:

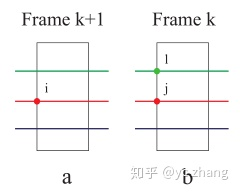
红、绿、蓝代表多线激光雷达的扫描线; 在第k+1帧中,边缘点i处在红色的扫瞄线上;在第k帧中,红线上的边缘点j和i更近,在相邻绿线上再找到一个最近的边缘点l,那么l和j构成一个边缘。 因此,对边缘特征点来说,优化的目标就是,i到直线lj的距离最近。
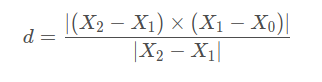
向量叉乘的模长,代表平行四边形的面积; 除以底,代表平行四边形的高; 也就是点到直线的距离。
平面点匹配方法:

红、绿、蓝代表多线激光雷达的扫描线; 在第k+1帧中,平面点i处在红色的扫瞄线上; 在第k帧中,红线上的平面点j和i更近,在同线上再找到一个附近的平面点l,在相邻绿线上再找到一个最近的平面点m,那么lmj构成一个平面。 因此,对平面特征点来说,优化的目标就是,i到平面mlj的距离最近。
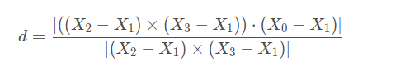
分子:三维物体的体积; 分母:地面构成的平行四边形的面积; 高=体积/面积 也就是点到平面的距离。
运动估计
- 在确定了两个优化目标:边缘点到边缘线的距离、平面点到平面的距离以后,就可以对特征点进行旋转,构建目标函数,通过非线性优化的方式进行梯度下降求解了。
- 作者论文中使用的求解方法是列文伯格-马尔夸特算法(LM),又叫阻尼牛顿法,可以避免求解中遇到的非奇异和病态问题。
LOAM虽然没有回环检测(不能发现自己到了相同的位置),但这并不代表它仅靠前端递推。 LOAM在建图部分,采用map-map的匹配方法,用连续10帧的激光点云数据,和10立方米之内的地图做一个匹配。也就是说,在第25帧的位姿,不是从0帧-1帧,1帧-2帧……一直递推到第25帧的。而是10~20帧之间构建的点云地图和全局地图匹配得到的第20帧位姿开始递推,从20~21,21~22……直到第25帧。
地图构建和全局位姿
- 建图部分采用map-map的匹配,仍然是基于边缘点和平面点,投影点云,计算点到直线和点到平面的距离。
- 里程计的匹配,是用两帧点云数据;
- 建图的匹配,是用10帧点云数据,和10立方米范围内的整个地图匹配。
- 特征点增加了10倍!
前端寻找边缘线和平面,使用的是最近临的方法。后端则不同,使用的是特征点周围的点云簇,通过主成分分析(求解协方差矩阵的特征值和特征向量)确定边缘线和平面。
LOAM的优点是:
1.提出了新颖的特征提取方式。
2.根据时间戳,对旋转的雷达采集时间不一致进行运动补偿。
3.融合了scan to scan(里程计部分) map to map(建图部分)的思想。
LOAM的缺点也很明显:
1.没有回环检测。(发表时间较早,比谷歌Cartographer要早两年)
2.不能处理大规模的旋转变换。
KITTI数据集
接下来看看什么是KITTI数据集。更多关于该数据集的,可以参考

KITTI数据采集平台:1个惯性导航系统,1个64线3D激光雷达, 2个灰度摄像机,2个彩色摄像机,以及4个光学镜头。
KITTI数据集主要有以下Benchmark:road(用于道路分割),semantics(用于语义分割),object(2D、3D和鸟瞰三种视角,用于目标检测),depth(用于视觉深度评估),stereo(用于双目立体视觉和三维重建),flow(用于光流预测),tracking(用于目标跟踪),odometry(里程计)。
另外还提供了velodyne64线激光雷达数据。评估标准:平移误差(百分比),旋转度数(度每米)。
A-LOAM
A-LOAM是港科大秦通博士(VINS-Mono一作)在LOAM原有代码基础上,使用Ceres-solver和Eigen库对其进行重构和优化,在保持原有算法原理的基础上,使其可读性大大增加,作为入门多线激光slam最好选择。
先基于作者的github工程(https://github.com/HKUST-Aerial-Robotics/A-LOAM)来构建环境进行数据集测试。
Ceres Solver的安装参考连接Installation — Ceres Solver
安装完后可以测试
bin/simple_bundle_adjuster ../ceres-solver/data/problem-16-22106-pre.txt
而PCL的安装可以参考:
# 安装依赖
sudo apt-get update
sudo apt-get install git build-essential linux-libc-dev
sudo apt-get install cmake cmake-gui
sudo apt-get install libusb-1.0-0-dev libusb-dev libudev-dev
sudo apt-get install mpi-default-dev openmpi-bin openmpi-common
sudo apt-get install libflann1.8 libflann-dev
sudo apt-get install libeigen3-dev
sudo apt-get install libboost-all-dev
sudo apt-get install libvtk5.10-qt4 libvtk5.10 libvtk5-dev
sudo apt-get install libqhull* libgtest-dev
sudo apt-get install freeglut3-dev pkg-config
sudo apt-get install libxmu-dev libxi-dev
sudo apt-get install mono-complete
sudo apt-get install qt-sdk openjdk-8-jdk openjdk-8-jre
# 版本可能需要修改,比如libflann1.9
# 安装OpenNI
git clone https://github.com/OpenNI/OpenNI.git
cd OpenNI
cd Platform/Linux/CreateRedist
./RedistMaker
cd Platform/Linux/Redist/OpenNI-Bin-Dev-Linux-x64-v1.5.7.10
./install.sh
# 下载pcl
git clone `pcl`
# 编译
cd pcl
mkdir build && cd build
cmake BUILD_GPU ON \
BUILD_CUDA ON \
BUILD_OPENNI ON \
BUILD_gpu_kinfu ON \
BUILD_gpu_kinfu_large_scale ON ..
make -j8
# .so安装到/usr/local/lib中
make install
不过好像直接运行下面命令即可
sudo apt install libpcl-dev首先测试NSH indoor outdoor数据集
roslaunch aloam_velodyne aloam_velodyne_VLP_16.launch
rosbag play YOUR_DATASET_FOLDER/nsh_indoor_outdoor.bag
效果如下所示
基于nsh
接下来看看KITTI数据集。感觉下载雷达的数据集测试就对了hh
roslaunch aloam_velodyne aloam_velodyne_HDL_64.launch
roslaunch aloam_velodyne kitti_helper.launchLeGO-LOAM (Lightweight and Ground-Optimized Lidar Odometry and Mapping on Variable Terrain)
LeGO-LOAM(lightweight and ground optimized lidar odometry and mapping) 是Tixiao Shan在原有LOAM基础上,做了一些改进包括:1、对前端里程计的前量化改造,提取地面点更适配水平安装的LiDAR; 2、使用SLAM中的Keyframe概念以及回环检测位姿图优化的方式对后端进行重构。简而言之,其主要在于两点提升:轻量级和地面优化。其发表在IROS2018。
该算法是基于VLP-16激光雷达的,在进行特征提取前,会先进行语义分割(segmentation)。其框架如下所示。
- Segmentation:对点云进行分割,分割为地面和非地面区域;
- Feature Extraction:基于分割后的点,和LOAM类似的算法提取出边缘点和平面点;
- Lidar Odometry:基于提取的特征点,scan-to-scan推算两帧激光之间的相对位姿变换(使用两次LM优化),频率较高(10Hz);
- Lidar Mapping: scan-to-map,构建全局地图,获得世界坐标系下的位姿,频率较低(2Hz);
- Transform Intergration:与LOAM相同,实时利用世界坐标系下的位姿和两个时刻之间的相对位姿,更新各个时刻世界坐标系下的位姿


在提取特征点之前,对点云进行一个聚类操作:低于30个数据点的类别就当成噪声处理,这样保存下来的点就是一些相对比较静态的物体了。

右图为聚类处理后的点云,红色部分被分割为地面点。对前述形成的16*1800的距离图像,水平分成若干个子图像(sub-image),对每一个子图像都进行特征提取操作:依旧是和LOAM中相同的边缘点和平面点评判标准,根据曲率c,区分边缘点和平面点。
之后,要划分两个大集合:
- 每一行中,选取有最大c值的N_Fme(40个)边缘点,要求不得属于地面点, 组成集合F_me;
- 每一行中,选取有最小c值的N_Fmp(80个)平面点,组成集合F_mp;
之后,再从F_me和F_mp中,划分两个小集合:
- n_fe(2个)边缘点;
- n_fp(4个)平面点,要求是地面点。
下图展示了大集合和小集合的区别。

运动估计
雷达里程计部分,要根据两帧点云,确定相对的位姿变换:
- 从t时刻的小集合中,选取边缘点,和t-1时刻的大集合中的边缘点,构建点到线的关系,构建方法和LOAM一致。
- 从t时刻的小集合中,选取平面点,和t-1时刻的大集合中的地面点,构建点到面的关系,构建方法和LOAM一致。

构建了目标函数以后,仍然采用LOAM中的列文伯格-马尔夸特优化算法,但是分了两阶段,第一阶段计算竖直维度的z,roll,pitch。(根据地面的平面点来优化)第二阶段计算水平维度的x,y,yaw,根据边缘点来优化。 两次LM优化得到相同的精度,实验计算时间减少35%。
地图构建和全局位姿
与LOAM一致,Lego-LOAM同样也是采用了一快一慢两个部分,快的Lidar Odometry 10Hz来计算相对变换,慢的Lidar Mapping 2Hz来计算世界坐标系下的位姿。相当于10Hz在2Hz的基础上递推。
Lego-LOAM不再存储所有的传感器点云数据,而是只存储特征点集。
LOAM采取的是map-to-map的优化,最近的十帧点云与10立方米内的全局地图进行匹配,主成分分析,构建点到线、点到面的误差;
Lego-LOAM采取的是scan-to-map的优化,scan为当前帧点云中的特征点集;map有两种取法:第一种,和LOAM中一致,10立方米;第二种,选一组时间上相近的特征点云,构建图优化问题。当前时刻的特征点云作为观测数据,当前位姿作为优化节点。
使用的优化库:不再是谷歌公司的Ceres,而是因子图优化库gtstam。
回环检测
Lego-LOAM中加入了回环检测,是单独用一个线程运行的。
流程:
第一步,寻找历史位姿:1.与当前位姿的距离上最近。2.与当前位姿间隔时间较长。(这样才是回环)
第二步,把历史位姿作为候选,用ICP算法迭代,修正位姿。
我们可以看出:1.相比Cartographer(激光点云投影到栅格地图,暴力搜索全局地图,分支定界加速,确定初值以后用非线性优化精修),Lego-LOAM的回环检测就是一个简单的回环检测,其默认偏移较小。如果偏移较大,就不能修正了。2.不具备重定位功能。因为这种算法的前提是需要知道自己的大致位置,和历史中附近的位置进行匹配,修正位姿。
Lego-LOAM有一个显著的缺陷——依赖地面。
The system takes in point cloud from a Velodyne VLP-16 Lidar (palced horizontally) and optional IMU data as inputs. It outputs 6D pose estimation in real-time.基于下面的原理来求出6D的pose

接下来根据github工程,配置一下该代码(https://github.com/RobustFieldAutonomyLab/LeGO-LOAM)
这里有个小知识,对于cm一开始采用
catkin_make -j1When you compile the code for the first time, you need to add "-j1" behind "catkin_make" for generating some message types. "-j1" is not needed for future compiling.
运行方式
roslaunch lego_loam run.launch
Notes: The parameter "/use_sim_time" is set to "true" for simulation, "false" to real robot usage.
rosbag play *.bag --clock --topic /velodyne_points /imu/data
注意:Notes: Though /imu/data is optinal, it can improve estimation accuracy greatly if provided.
关于数据集(https://github.com/TixiaoShan/Stevens-VLP16-Dataset)是采用Velodyne VLP-16来收集的
一些样板数据集(https://github.com/RobustFieldAutonomyLab/jackal_dataset_20170608)
此处,先跑一下上面的A-LOAM的NSH indoor outdoor数据集
当报错[mapOptmization-7] process has died时,可以试试
sudo apt-get install libparmetis-dev然后再运行即可,详见下面展示
基于nsh
LIO-SAM (Tightly-coupled Lidar Inertial Odometry via Smoothing and Mapping)
LIO-SAM 是Tixiao Shan在LeGO-LOAM的扩展, 实际上也是Lego-LOAM的扩展版本。添加了IMU预积分因子和GPS因子:前端使用紧耦合的IMU融合方式,替代原有的帧间里程计,使得前端更轻量;后端沿用LeGO-LOAM,在此基础上融入了GPS观测。同时前端后端相互耦合,提高系统精度。LIO-SLAM是一个real-time lidar-inertial odometry package
其框架如下所示。
使用关键帧Keyframe,使用关键帧进行匹配,丢掉了关键帧之间的帧。(阈值设置为1m和10度)。四种因子:
橙色:IMU预积分因子(可参考之前的博客《学习笔记之——VIO与VINS-Mono》);
绿色:雷达里程计因子,激光“关键帧” 和 “之前的N个关键帧构成的体素地图” 进行匹配
雷达里程计部分主要得到两帧之间的位姿变换; 方法基本与LOAM或Lego-LOAM的一致。
区别:仅用关键帧和之前n+1个关键帧中的特征集合构成地图,进行匹配,构建点到线、点到面的约束; (原先是使用帧到帧的匹配)
关于这点,该方法应该没有使用Lego-LOAM的提取地面特征的方式,因为在实验部分,采用手持建图、轮船水面建图,可能不适合Lego-LOAM该方式。
黄色:GPS因子: 当估计位姿的方差大于GPS位置方差时加入
收到一个GPS测量,即将其转换到笛卡尔坐标系下,构建一个新的约束;
时间戳不同步问题: 插值解决;
当估计的位置的协方差大于GPS位置协方差时,才插入一个约束因子。
黑色:回环检测因子,由关键帧和候选关键帧相邻的2m+1个关键帧帧图匹配得到。该方法使用的回环检测方法,应该和Lego-LOAM中的一致; 搜索当前位置15m内的最近历史位置,使用该历史位置的前后分别12个关键帧的特征,和当前匹配,构建约束。

接下来看看https://github.com/TixiaoShan/LIO-SAM按照github工程进行配置。大部分的设置都是前面的几个算法用过的。然后运行
roslaunch lio_sam run.launch
rosbag play your-bag.bag -r 3对于要跑的数据集,需要设置对应的参数:
-
Download some sample datasets to test the functionality of the package. The datasets below is configured to run using the default settings:
- Walking dataset: [Google Drive]
- Park dataset: [Google Drive]
- Garden dataset: [Google Drive]
-
The datasets below need the parameters to be configured. In these datasets, the point cloud topic is "points_raw." The IMU topic is "imu_correct," which gives the IMU data in ROS REP105 standard. Because no IMU transformation is needed for this dataset, the following configurations need to be changed to run this dataset successfully:
- The "imuTopic" parameter in "config/params.yaml" needs to be set to "imu_correct".
- The "extrinsicRot" and "extrinsicRPY" in "config/params.yaml" needs to be set as identity matrices.
- Rotation dataset: [Google Drive]
- Campus dataset (large): [Google Drive]
- Campus dataset (small): [Google Drive]
对应修改如下:
lio_sam:
# Topics
pointCloudTopic: "points_raw" # Point cloud data
# imuTopic: "imu_raw" # IMU data
imuTopic: "imu_correct" # IMU data
odomTopic: "odometry/imu" # IMU pre-preintegration odometry, same frequency as IMU
gpsTopic: "odometry/gpsz" # GPS odometry topic from navsat, see module_navsat.launch file
# Frames
lidarFrame: "base_link"
baselinkFrame: "base_link"
odometryFrame: "odom"
mapFrame: "map"
# GPS Settings
useImuHeadingInitialization: true # if using GPS data, set to "true"
useGpsElevation: false # if GPS elevation is bad, set to "false"
gpsCovThreshold: 2.0 # m^2, threshold for using GPS data
poseCovThreshold: 25.0 # m^2, threshold for using GPS data
# Export settings
savePCD: false # https://github.com/TixiaoShan/LIO-SAM/issues/3
savePCDDirectory: "/Downloads/LOAM/" # in your home folder, starts and ends with "/". Warning: the code deletes "LOAM" folder then recreates it. See "mapOptimization" for implementation
# Sensor Settings
sensor: velodyne # lidar sensor type, either 'velodyne' or 'ouster'
N_SCAN: 16 # number of lidar channel (i.e., 16, 32, 64, 128)
Horizon_SCAN: 1800 # lidar horizontal resolution (Velodyne:1800, Ouster:512,1024,2048)
downsampleRate: 1 # default: 1. Downsample your data if too many points. i.e., 16 = 64 / 4, 16 = 16 / 1
lidarMinRange: 1.0 # default: 1.0, minimum lidar range to be used
lidarMaxRange: 1000.0 # default: 1000.0, maximum lidar range to be used
# IMU Settings
imuAccNoise: 3.9939570888238808e-03
imuGyrNoise: 1.5636343949698187e-03
imuAccBiasN: 6.4356659353532566e-05
imuGyrBiasN: 3.5640318696367613e-05
imuGravity: 9.80511
imuRPYWeight: 0.01
# Extrinsics (lidar -> IMU)
extrinsicTrans: [0.0, 0.0, 0.0]
# extrinsicRot: [-1, 0, 0,
# 0, 1, 0,
# 0, 0, -1]
# extrinsicRPY: [0, 1, 0,
# -1, 0, 0,
# 0, 0, 1]
extrinsicRot: [1, 0, 0,
0, 1, 0,
0, 0, 1]
extrinsicRPY: [1, 0, 0,
0, 1, 0,
0, 0, 1]
# LOAM feature threshold
edgeThreshold: 1.0
surfThreshold: 0.1
edgeFeatureMinValidNum: 10
surfFeatureMinValidNum: 100
# voxel filter paprams
odometrySurfLeafSize: 0.4 # default: 0.4 - outdoor, 0.2 - indoor
mappingCornerLeafSize: 0.2 # default: 0.2 - outdoor, 0.1 - indoor
mappingSurfLeafSize: 0.4 # default: 0.4 - outdoor, 0.2 - indoor
# robot motion constraint (in case you are using a 2D robot)
z_tollerance: 1000 # meters
rotation_tollerance: 1000 # radians
# CPU Params
numberOfCores: 4 # number of cores for mapping optimization
mappingProcessInterval: 0.15 # seconds, regulate mapping frequency
# Surrounding map
surroundingkeyframeAddingDistThreshold: 1.0 # meters, regulate keyframe adding threshold
surroundingkeyframeAddingAngleThreshold: 0.2 # radians, regulate keyframe adding threshold
surroundingKeyframeDensity: 2.0 # meters, downsample surrounding keyframe poses
surroundingKeyframeSearchRadius: 50.0 # meters, within n meters scan-to-map optimization (when loop closure disabled)
# Loop closure
loopClosureEnableFlag: true
loopClosureFrequency: 1.0 # Hz, regulate loop closure constraint add frequency
surroundingKeyframeSize: 50 # submap size (when loop closure enabled)
historyKeyframeSearchRadius: 15.0 # meters, key frame that is within n meters from current pose will be considerd for loop closure
historyKeyframeSearchTimeDiff: 30.0 # seconds, key frame that is n seconds older will be considered for loop closure
historyKeyframeSearchNum: 25 # number of hostory key frames will be fused into a submap for loop closure
historyKeyframeFitnessScore: 0.3 # icp threshold, the smaller the better alignment
# Visualization
globalMapVisualizationSearchRadius: 1000.0 # meters, global map visualization radius
globalMapVisualizationPoseDensity: 10.0 # meters, global map visualization keyframe density
globalMapVisualizationLeafSize: 1.0 # meters, global map visualization cloud density
# Navsat (convert GPS coordinates to Cartesian)
navsat:
frequency: 50
wait_for_datum: false
delay: 0.0
magnetic_declination_radians: 0
yaw_offset: 0
zero_altitude: true
broadcast_utm_transform: false
broadcast_utm_transform_as_parent_frame: false
publish_filtered_gps: false
# EKF for Navsat
ekf_gps:
publish_tf: false
map_frame: map
odom_frame: odom
base_link_frame: base_link
world_frame: odom
frequency: 50
two_d_mode: false
sensor_timeout: 0.01
# -------------------------------------
# External IMU:
# -------------------------------------
imu0: imu_correct
# make sure the input is aligned with ROS REP105. "imu_correct" is manually transformed by myself. EKF can also transform the data using tf between your imu and base_link
imu0_config: [false, false, false,
true, true, true,
false, false, false,
false, false, true,
true, true, true]
imu0_differential: false
imu0_queue_size: 50
imu0_remove_gravitational_acceleration: true
# -------------------------------------
# Odometry (From Navsat):
# -------------------------------------
odom0: odometry/gps
odom0_config: [true, true, true,
false, false, false,
false, false, false,
false, false, false,
false, false, false]
odom0_differential: false
odom0_queue_size: 10
# x y z r p y x_dot y_dot z_dot r_dot p_dot y_dot x_ddot y_ddot z_ddot
process_noise_covariance: [ 1.0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 1.0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 10.0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0.03, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0.03, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0.1, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0.25, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0.25, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0.04, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0.01, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0.01, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0.5, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0.01, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0.01, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0.015]
demo视频如下:
LIO-SLAM复现(3D LiDAR SLAM)
其节点图如下所示

SC-LIO-SAM
https://github.com/gisbi-kim/SC-LIO-SAM
LVI-SAM (Tightly-coupled Lidar-Visual-Inertial Odometry via Smoothing and Mapping)
- LVI-SAM为Lego-LOAM和LIO-SAM作者Tixiao Shan的最新工作,发表在ICRA 2021上。
- 提出了一个基于图优化的多传感器融合框架,具有多个子系统: 视觉惯性子系统(VIS) 和 雷达惯性子系统 (LIS); 单目+雷达+imu融合
- 鲁棒性:任一子系统失效,不会导致整个系统挂掉。
这是一个基于视觉与激光雷达的系统。对于现有的方法而言,单纯视觉或者激光雷达都有各自的不足。
- 基于激光的方法,在结构比较简单的环境里,容易失效——因为特征只有一个简单的“距离”信息;
- 基于视觉的方法,容易受到光照改变、快速运动导致的图像模糊等问题; 所以,一般会加入IMU传感器——但IMU具有bias,其估计的并不是很准。
其框架如下所示。LVI-SAM使用了两个子系统,视觉惯性系统(VIS)和雷达惯性系统(LIS):
1.视觉惯性系统用雷达惯性系统来初始化;——用LIS计算的位姿,作为VIS的初始优化值;
2.VIS中需要根据图像计算特征的深度,可以利用雷达的测量数据来辅助优化;
3. LIS计算两个点云位姿变换的优化初值,同样也可以用VIS的视觉估计来计算;
4. 回环检测可以用视觉信息确定初值,再用雷达数据优化。

视觉-惯性框架

雷达-惯性框架


而对于回环检测部分。LVI所采用的回环检测,与大多数视觉SLAM所采取的回环检测方法相同,为词袋模型。
接下来复现该demo,参考github工程GitHub - TixiaoShan/LVI-SAM: LVI-SAM: Tightly-coupled Lidar-Visual-Inertial Odometry via Smoothing and Mapping
编译出错的时候换一下eigen库(ubuntu安装eigen3.3.7_reason的博客-CSDN博客)
查看已安装版本
gedit /usr/local/include/eigen3/Eigen/src/Core/util/Macros.h
发现是空的。。。好像这个解决办法不太靠谱,换一个(LOAM-Livox算法编译过程中出现的问题及解决方案_LacyExsale的博客-CSDN博客)。具体报错如下,应该是ceres的版本不对?
error: ‘ScalarBinaryOpTraits’ is not a class template
struct ScalarBinaryOpTraits<ceres::Jet<T, N>, T, BinaryOp> {
^~~~~~~~~~~~~~~~~~~~
/usr/local/include/ceres/jet.h:1027:58: error: type/value mismatch at argument 3 in template parameter list for ‘template<class BinaryOp, class T, int N> struct Eigen::ScalarBinaryOpTraits’
struct ScalarBinaryOpTraits<T, ceres::Jet<T, N>, BinaryOp> {
^
/usr/local/include/ceres/jet.h:1027:58: note: expected a constant of type ‘int’, got ‘BinaryOp’之前安装的是2.0.0版本(查看/home/kwanwaipang/ceres-solver/package.xml里面的ersion)试试重新配置
sudo apt-get install -y libgoogle-glog-dev
sudo apt-get install -y libatlas-base-dev
wget -O ~/下载/ceres.zip https://github.com/ceres-solver/ceres-solver/archive/1.14.0.zip
cd ~/下载/ && unzip ceres.zip -d ~/下载/
cd ~/下载/ceres-solver-1.14.0
mkdir ceres-bin && cd ceres-bin
cmake ..
sudo make install -j4
然后再编译,老报错
c++: internal compiler error: 已杀死 (program cc1plus)
cm几次终于成功了hhhh
运行
roslaunch lvi_sam run.launch
rosbag play handheld.bag demo如下所示:
LVI
其节点图如下所示

LOAM_livox(固态激光雷达)
其为2019年开源的工作。是基于固态激光雷达的。接下来先看看固态雷达和机械雷达的区别:
机械雷达:通过机械方式改变扫描方向;类似于一个激光笔,放在电机上旋转;十六线雷达,就是依次改变扫描的角度和高度,进行旋转。
固态雷达:通过阵列干涉改变扫描方向。类似于一个激光笔自己不动,改变激光射出的方向和角度。
这论文的理论部分先不看,先直接开始试验,后面补充博文研究~
接下来按照github工程进行配置:https://github.com/hku-mars/loam_livox
Loam-Livox is a robust, low drift, and real time odometry and mapping package for Livox LiDARs
下载好功能包后,编译,然后运行下面命令
roslaunch loam_livox rosbag.launch
rosbag play YOUR_DOWNLOADED.bag
此处,先跑一下上面的A-LOAM的NSH indoor outdoor数据集
好像不可以。。。。是因为本包是基于Livox LiDARs吧?
然后再看看该工程在hku以及hkust环境下运行的结果(注意前面的A-LOAM无法在此数据集下运行,估计是包的数据不一样或者是采集的数据结构不一样?)
基于HKUST数据集的LOAM
基于HKUST数据集的LOAM
CCM- SLAM
除了激光雷达slam外,本博文也跑了一下CMM-SLAM,基于单目camera,多个机器人的collaboration SLAM。
CCM(centralized,collaborative,monocular cmaera)
首先编译两个库
进入ccm_slam/cslam/thirdparty/DBoW2/然后运行
mkdir build
cd build
cmake ..
make -j8进入g2o然后运行
cd ~/ccmslam_ws/src/ccm_slam/cslam/thirdparty/g2o
mkdir build
cd build
cmake --cmake-args -DG2O_U14=0 ..
make -j8Unzip Vocabulary:
cd ~/ccmslam_ws/src/ccm_slam/cslam/conf
unzip ORBvoc.txt.zip直接在当前工作空间做好像不行。。。新建一个工作空间试试~
按照github里面的教程步骤走即可( 注意若为ubuntu18.04需要将里面的ros版本改为melodic)
编译的时候如果出现报错,可以修改其中的cpp文件
/home/kwanwaipang/ccmslam_ws/src/ccm_slam/cslam/src/KeyFrame.cpp
// size_t KeyFrame::nNextId=0;
long unsigned int KeyFrame::nNextId=0;然后再编译一下就成功了~

注意每次运行都应该先source一下工作空间
source ~/ccmslam_ws/devel/setup.bash通过下面命令开启服务
roslaunch ccmslam Server.launch写一个sh文件如下
#! /bin/bash
###############################################################
gnome-terminal -t "server" -x bash -c "roslaunch ccmslam Server.launch;exec bash;"
sleep 15
gnome-terminal -t "agent1" -x bash -c "roslaunch ccmslam Client0_euroc.launch;exec bash;"
gnome-terminal -t "agent2" -x bash -c "roslaunch ccmslam Client1_euroc.launch;exec bash;"
gnome-terminal -t "agent3" -x bash -c "roslaunch ccmslam Client2_euroc.launch;exec bash;"
gnome-terminal -t "agent4" -x bash -c "roslaunch ccmslam Client3_euroc.launch;exec bash;"
sleep 15
gnome-terminal -t "rviz" -x bash -c "cd /home/kwanwaipang/ccmslam_ws/src/ccm_slam/cslam; rviz -d conf/rviz/ccmslam.rviz;exec bash;"
#如果roscd报错的话就直接用cd
sleep 15
gnome-terminal -t "agentbag1" -x bash -c "cd /home/kwanwaipang/下载;rosbag play MH_01_easy.bag --start 45;exec bash;"
#cd 数据集包所在的位置
gnome-terminal -t "agentbag2" -x bash -c "cd /home/kwanwaipang/下载;rosbag play MH_02_easy.bag --start 35 /cam0/image_raw:=/cam0/image_raw1;exec bash;"
gnome-terminal -t "agentbag2" -x bash -c "cd /home/kwanwaipang/下载;rosbag play MH_03_medium.bag --start 15 /cam0/image_raw:=/cam0/image_raw2;exec bash;"
gnome-terminal -t "agentbag2" -x bash -c "cd /home/kwanwaipang/下载;rosbag play MH_04_difficult.bag --start 15 /cam0/image_raw:=/cam0/image_raw3;exec bash;" EuRoC dataset数据集下载
kmavvisualinertialdatasets – ASL Datasets
实验视频结果如下:
(ccmslam)基于三个agents的单目SLAM地图融合
参考资料:
github
https://github.com/RobustFieldAutonomyLab/LeGO-LOAM(LeGO-LOAM)
https://github.com/gisbi-kim/SC-LIO-SAM
https://github.com/HKUST-Aerial-Robotics/A-LOAM
https://github.com/hku-mars/loam_livox
https://github.com/engcang/SLAM-application
https://github.com/cuitaixiang/LOAM_NOTED/tree/master/papers
https://github.com/VIS4ROB-lab/ccm_slam
其他资源
重磅来袭!基于LiDAR的多传感器融合SLAM 系列教程:LOAM、LeGO-LOAM、LIO-SAM
激光雷达50年(关于LiDAR的发展,参考此链接)
自动驾驶中激光雷达如何检测障碍物?(关于LiDAR如何检测障碍物)
https://github.com/4artit/SFND_Lidar_Obstacle_Detection
https://blog.csdn.net/lrwwll/article/details/102081821(PCL的安装)
SLAM学习笔记(十九)开源3D激光SLAM总结大全——Cartographer3D,LOAM,Lego-LOAM,LIO-SAM,LVI-SAM,Livox-LOAM的原理解析及区别_微鉴道长的博客-CSDN博客(SLAM学习笔记(十九)开源3D激光SLAM总结大全——Cartographer3D,LOAM,Lego-LOAM,LIO-SAM,LVI-SAM,Livox-LOAM的原理解析及区别)

旨在为数千万中国开发者提供一个无缝且高效的云端环境,以支持学习、使用和贡献开源项目。
更多推荐



 56
56 0
0- 0



 已为社区贡献23条内容
已为社区贡献23条内容

所有评论(0)