
ABB机器人RobotStudio创建机器人离线轨迹曲线及路径学会创建工件的机器人轨迹曲线、生成工件的机器人轨迹曲线路径、机器人目标点的调整、机器人轴配置参数调整、离线轨迹编程的关键点
【在这之前要先解压工作站以及相关的组件】
1、隐藏暂时不需要的相关组件。首先按住【ctrl键】不放,选中需要隐藏的相关组件,右键单击,然后取消勾选【可见】 2、单击【表面边界】
2、单击【表面边界】 3、单击【选择便面】下面的方框,选择需要创建的表面,然后单击【创建】
3、单击【选择便面】下面的方框,选择需要创建的表面,然后单击【创建】 4、单击【关闭】
4、单击【关闭】
 5、选择【其他】—【创建工件坐标】
5、选择【其他】—【创建工件坐标】
 6、选中要用到的【任务】,选择要用到的【工具】,选择【末端捕捉】,先点一下【用户坐标框架】下的【取点创建框架】,然后会出现一个下拉箭头,单机一下这个下拉箭头。
6、选中要用到的【任务】,选择要用到的【工具】,选择【末端捕捉】,先点一下【用户坐标框架】下的【取点创建框架】,然后会出现一个下拉箭头,单机一下这个下拉箭头。
(ctrl+左键移动试图、ctrl+shift+左键旋转视图、滑动鼠标滚轮视图放大缩小)
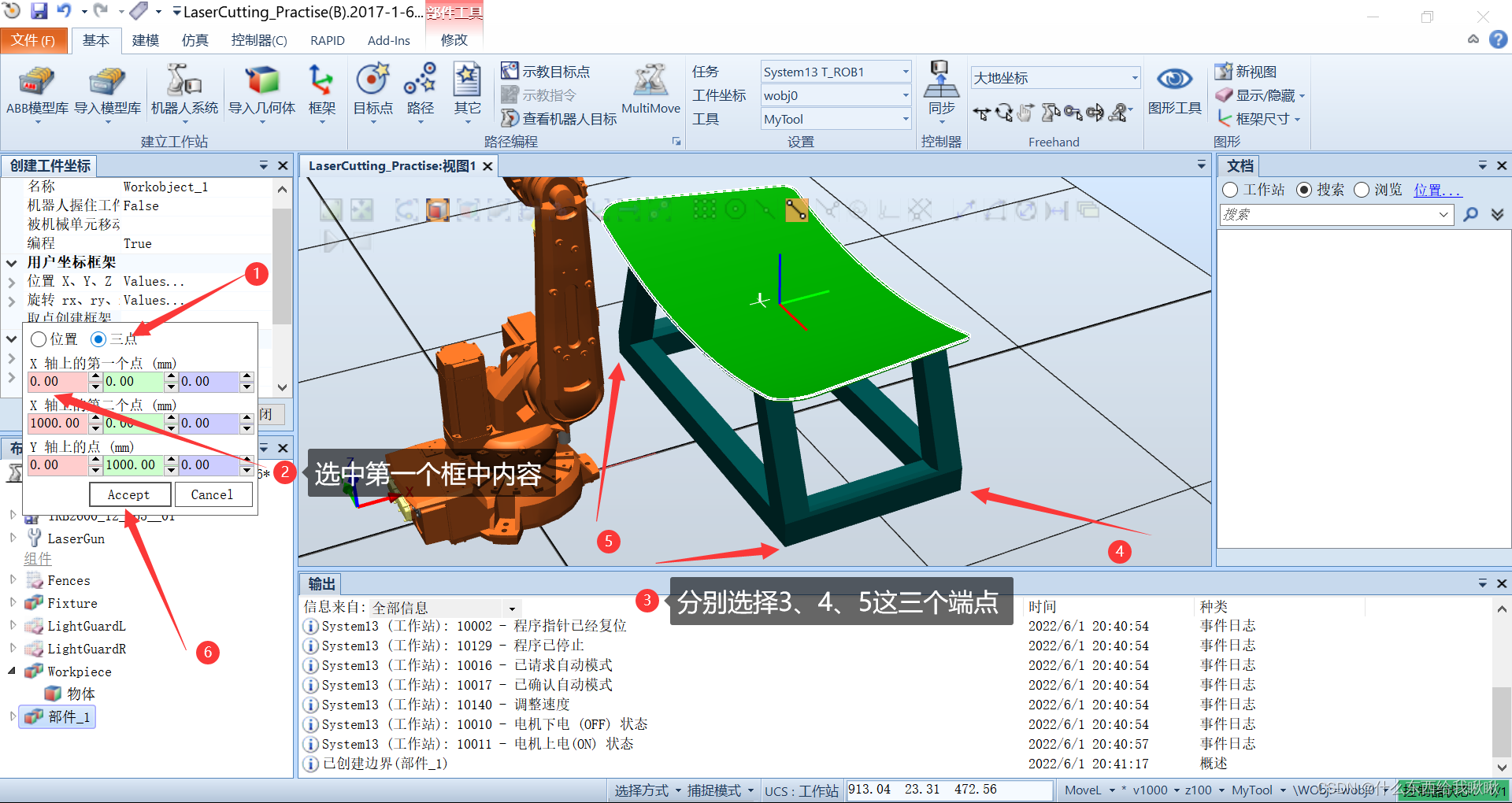
 7、选中【三点】,选中x轴下的第一个方框内容,按顺序选中【3】【4】【5】这三个端点,分别作为新建坐标的【x】【y】【z】轴。单击【Accept】
7、选中【三点】,选中x轴下的第一个方框内容,按顺序选中【3】【4】【5】这三个端点,分别作为新建坐标的【x】【y】【z】轴。单击【Accept】
 8、单击【创建】
8、单击【创建】
 9、创建完以后,就可以看到创建的坐标系了
9、创建完以后,就可以看到创建的坐标系了
 10、单击【路径】—【自动路径】
10、单击【路径】—【自动路径】
 11、选择需要创建路径的边,选择所创建的路径的【参照面】,单击创建
11、选择需要创建路径的边,选择所创建的路径的【参照面】,单击创建
 12、单击【关闭】
12、单击【关闭】

13、右键单击【Target_10】,选择【查看目标出工具】—【Lasergun】
 14、右键单击【Target_10】,选择【修改目标】—【旋转】
14、右键单击【Target_10】,选择【修改目标】—【旋转】
 15、选择【z】轴,选择需要旋转的角度,单击【应用】
15、选择【z】轴,选择需要旋转的角度,单击【应用】
 16、观察角度是否合适,单击【应用】,然后单击【关闭】
16、观察角度是否合适,单击【应用】,然后单击【关闭】
 17、选中【Target_20】一直到【最后一个】,右键单击,选择【修改目标】—【对准目标点方向】
17、选中【Target_20】一直到【最后一个】,右键单击,选择【修改目标】—【对准目标点方向】
 18、选择【参考】下的方框,单击【Target_20】,单击【应用】
18、选择【参考】下的方框,单击【Target_20】,单击【应用】
 19、单击【关闭】
19、单击【关闭】
 ,20、选择【Target_10】,右键单击,选择【参数配置】
,20、选择【Target_10】,右键单击,选择【参数配置】
 21、选择一个合适的【配置参数】,单击【应用】(注意:j1到j6的角度要小于九十度)
21、选择一个合适的【配置参数】,单击【应用】(注意:j1到j6的角度要小于九十度)
 22、单击【关闭】
22、单击【关闭】

23、右键单击【Path_10】,选择【自动配置】—【线性/圆周移动指令】
 24、右键单击【Path_10】,选择【沿着路经运动】
24、右键单击【Path_10】,选择【沿着路经运动】
 25、右键单击【Target_10】,选择【复制】
25、右键单击【Target_10】,选择【复制】

26、右键单击【Workobject_1_of】,单击【粘贴】

27、右键单击【Target_10_2】,单击【重命名】
 28、重命名为【Papproach】
28、重命名为【Papproach】
 29、右键单击【Papproach】,选择【修改目标】—【偏移位置】
29、右键单击【Papproach】,选择【修改目标】—【偏移位置】
 30、选择【Translation】下的第三个窗口,将这个窗口设置为【-150】,单击【应用】
30、选择【Translation】下的第三个窗口,将这个窗口设置为【-150】,单击【应用】

31、右键单击【Papproach】,选择【添加到路径】—【Path_10】—【<第一>】
 32、右键单击【Papproach】,选择【复制】
32、右键单击【Papproach】,选择【复制】
 33、右键单击【Workobject_1_of】,单击【粘贴】
33、右键单击【Workobject_1_of】,单击【粘贴】

34、右键单击【Papproach_2】,单击【重命名】
 35、重命名为【Getaway】
35、重命名为【Getaway】
 36、右键单击【Getaway】,选择【添加到路径】—【Path_10】—【<最后>】
36、右键单击【Getaway】,选择【添加到路径】—【Path_10】—【<最后>】
 37、右键单击【IRB2600】,选择【回到机器人原点】
37、右键单击【IRB2600】,选择【回到机器人原点】
 38、单击【示教目标点】
38、单击【示教目标点】
 39、找到【Target_330】,单击【重命名】
39、找到【Target_330】,单击【重命名】
 40、重命名为【Home_1】
40、重命名为【Home_1】
 41、右键单击【Home_1】,选择【添加到路径】—【Path_10】—【<第一>】
41、右键单击【Home_1】,选择【添加到路径】—【Path_10】—【<第一>】
 42、右键单击【Home_1】,选择【添加到路径】—【Path_10】—【<第一>】
42、右键单击【Home_1】,选择【添加到路径】—【Path_10】—【<第一>】

43、选中所有的路径【修改指令】—【速度】—【v200】
【注意了注意了,还有下一步图中未显示】选中所有的路径【修改指令】—【区域】—【z5】
 44、选中部分特殊的路径【修改指令】—【区域】—【fine】
44、选中部分特殊的路径【修改指令】—【区域】—【fine】
 45、选中部分特殊的路径【编辑指令】
45、选中部分特殊的路径【编辑指令】
 46、将【动作类型】修改为【Joint】,单击【应用】
46、将【动作类型】修改为【Joint】,单击【应用】
 47、单击【关闭】
47、单击【关闭】
 48、右键单击【Path_10】—【沿着路径运动】
48、右键单击【Path_10】—【沿着路径运动】
 49、没有问题下面我们进行仿真
49、没有问题下面我们进行仿真
 50、单击【同步】
50、单击【同步】
 51、将【同步】这一列全选,单击【确定】
51、将【同步】这一列全选,单击【确定】
 52、单击【仿真设定】,选择【T_ROBT】,选择进入点【Path_10】,单击【关闭】,接下来就可以进行仿真了
52、单击【仿真设定】,选择【T_ROBT】,选择进入点【Path_10】,单击【关闭】,接下来就可以进行仿真了


旨在为数千万中国开发者提供一个无缝且高效的云端环境,以支持学习、使用和贡献开源项目。
更多推荐


 20
20 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)