
通俗易懂的双线性插值
双线性插值这个算法和公式,着实有点晦涩难懂,花了我很长时间。现在用图文并茂的方法,把我的理解记录一下。
双线性插值这个算法和公式,着实有点晦涩难懂,花了我很长时间。现在用图文并茂的方法,把我的理解记录一下。
一、先看一下线性插值法
学双线性插值法之前,先把线性插值法学懂,这个很重要,因为后面需要直接套公式。
上个图(网上盗的……):
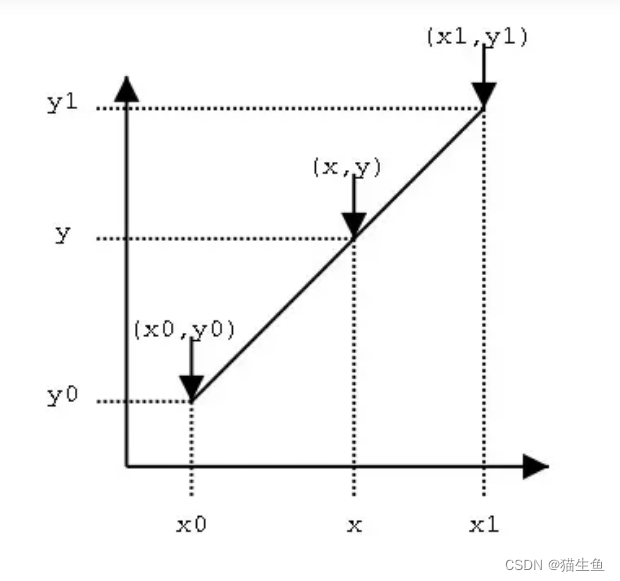
假设我们已知坐标(x0,y0)与(x1,y1),要得到[x0,x1]区间内某一位置x在直线上的值。根据上图中所示,我们从两点式直线方程:
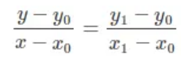
将这方程化解一下可得:
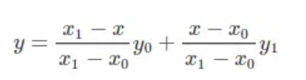
这个是有公式的,直接套就行:‘两点式方程公式’:已知直线1上的两点P1(x1, y1)、P2(x2, y2), (x1≠x2),那么可得:(y-y1)/(y2-y1)=(x-x1)/(x2-x1)。
二、再来看双线性插值法
知道了线性插值法学了之后,再来看双线性插值法。
要是不乐意看公式的,可以直接跳到图片演示,示例能看懂也行。
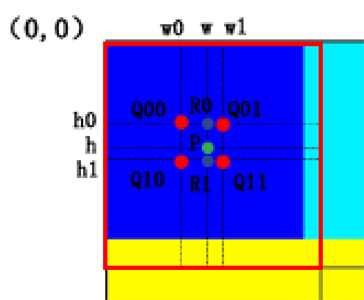
下面是关于双线性插值的经典说明图例:
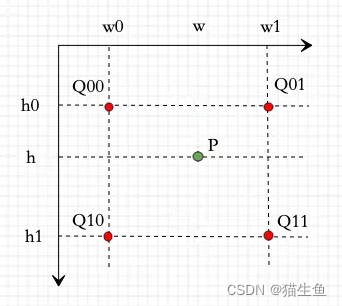
首先,图中有5个像素点:Q00, Q01, Q10, Q11, P。
其中四个红色点Q是原图的点,绿色点P则是目标图片上像素点在原图上的投影。
四个红色点Q就是投影点P的四周最近的点,通过这四个红色点Q,可以计算出投影点P的像素值,这样目标图片上的像素点点值就求出来了。
三、目标图的点如何投影到原图上?
已知:
1. 原图的高、宽、通道数为:height_src, width_src, channel_src。
2. 目标图的高、宽、通道数为:height_dst, width_dst, channel_src。因为通道要相同嘛
可以计算出投影公式为:h = h_dst * height_src / height_dst, w = w_dst * width_src / width_dst。
举个例子:原图大小是3 * 3, 目标图大小是9 * 9, 目标图的中心点坐标是(4,4)。按照上面的投影公式,计算目标图的中心点投影到原图中心点的坐标为:h = 4 * 3 / 9 = 1.3333, w = 4 * 3 / 9 = 1.3333,中心点坐标为(1.3333, 1.3333)。
这里就发现一个问题了,原图的大小为3*3,中心点坐标应该是(1,1)啊,公式计算出来的明显不一样。
之所以会出现这个情况,原因是每个像素点实际上是一个边长为1的正方形,所以对于坐标为(h,w)的像素点,它的中心其实是(h+0.5,w+0.5)。
所以精确的算法应该是: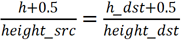 和
和 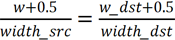 ,转换一下得到正确的投影公式:
,转换一下得到正确的投影公式:


四、如何插值计算得到投影点的像素值?
已知:
1. 四个红色点Q的坐标值为:h0, h1, w0, w1,它们的像素值为f(Q00), f(Q01), f(Q10), f(Q11)。
2. 投影点P的坐标值h, w。
思路是:每个Q点的像素值乘以各自的权重,然后想加得到投影点P像素值。
Q点跟P点的距离越近,它的权重就越大。
双线性插值给出的算法很简单粗暴:先在横轴方向上进行两次线性插值计算,然后在纵轴方向上进行一次插值计算。
求横轴上的两次线性插值计算,就是求R0和R1这两个蓝色点的像素值。
再通过R0和R1两点的像素值,求得P点的像素值。
因其上已经求过线性插值的公式为: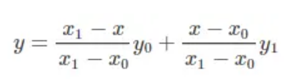 ,现在直接代入就可以了。
,现在直接代入就可以了。
具体计算如下:





前面有说过,四个红色点Q是投影点P四周最近的点,点P又是目标图片上的一个坐标,其实相当于是一个宽度为1的像素方块。
所以w1-w0=1, h1-h0=1。
即公式又可以写成:

再设置u和v,令:u=h-h0, v=w-w0,公式又可以写成:

到这一步,双线性插值的原理和公式就全部讲完了,再用一个图片来演示一下,融会贯通。
五、图片演示
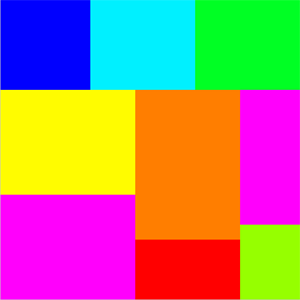
现在有如上这样一张图片,大小为20 * 20,通道3。现在想通过双线性插值的算法,将它变成3 * 3大小的图片。
先做一个坐标轴,记得图片的原坐标(0,0)是在左上角的,将整个图片分为3 * 3等份。
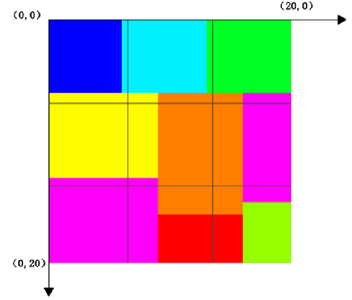
一份一份来计算:
那么来计算一下第一份的P点坐标。因为P点其实是目标图的像素点的投影。那么也就是(0,0)的投影,代入中心对齐后的算法公式,应该是:

那么P点的坐标值应该是(2.833, 2.833),Q作为离P点最近的坐标点,坐标应为:h0=2, h1=3, w0=2, w1=3。
到这里,就可以求出u和v的值来,u=h-h0=0.833, v=w-w0=0.833。
又因为我们这个图片是RGB的彩色图,通道为3,所以对应到3*3目标图上时,每一个通道的值都要计算。
现在我们可以来代入公式了。
已知:
1. Q的颜色值为:Q00(0, 0, 255), Q01(0, 0, 255), Q10(0, 0, 255), Q11(0, 0, 255)。
2. u=0.833, v=0.833。
代入公式可得:

可求得P点对应的目标图的坐标值为(0, 0, 255)。
以此类推,可讲3*3的目标图求出为:

代码
from PIL import Image
import numpy as np
import math
def bilinear_interpolate(src, dst_size):
height_src, width_src, channel_src = src.shape # (h, w, ch)
height_dst, width_dst = dst_size # (h, w)
"""
中心对齐,投影目标图的横轴和纵轴到原图上
"""
ws_p = np.array([(i + 0.5) / width_dst * width_src - 0.5 for i in range(width_dst)], dtype=np.float32)
hs_p = np.array([(i + 0.5) / height_dst * height_src - 0.5 for i in range(height_dst)], dtype=np.float32)
"""找出每个投影点在原图横轴方向的近邻点坐标对"""
# w_0的取值范围是 0 ~ (width_src-2),因为w_1 = w_0 + 1
ws_0 = np.clip(np.floor(ws_p), 0, width_src - 2).astype(int)
print(ws_p, ws_0)
"""找出每个投影点在原图纵轴方向的近邻点坐标对"""
# h_0的取值范围是 0 ~ (height_src-2),因为h_1 = h_0 + 1
hs_0 = np.clip(np.floor(hs_p), 0, height_src - 2).astype(int)
dst = np.zeros(shape=(height_dst, width_dst, channel_src), dtype=np.float32)
us = hs_p - hs_0
vs = ws_p - ws_0
_1_us = 1 - us
_1_vs = 1 - vs
for h in range(height_dst):
h_0, h_1 = hs_0[h], hs_0[h] + 1 # 原图的坐标
for w in range(width_dst):
w_0, w_1 = ws_0[w], ws_0[w] + 1 # 原图的坐标
for c in range(channel_src):
dst[h][w][c] = src[h_0][w_0][c] * _1_us[h] * _1_vs[w]\
+ src[h_0][w_1][c] * _1_us[h] * vs[w]\
+ src[h_1][w_0][c] * us[h] * _1_vs[w]\
+ src[h_1][w_1][c] * us[h] * vs[w]
return dst
im_path = 'test.bmp'
image = np.array(Image.open(im_path))
image2 = bilinear_interpolate(image, (3, 3))
image2 = Image.fromarray(image2.astype('uint8')).convert('RGB')
image2.save('out.png')

旨在为数千万中国开发者提供一个无缝且高效的云端环境,以支持学习、使用和贡献开源项目。
更多推荐



 19
19 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)