
ROS学习笔记(1)ROS安装(推荐使用鱼香ROS安装工具,少走很多弯路)
ROS安装
后记:提前说一下,按照网上的大部分ROS安装教程你会在下面的第四步遇到问题,然后在网上找各种解决办法,运气好的话你会很快解决,但是也可能卡住半天没解决(比如我hh),这个时候推荐用鱼香ROS的工具,帮助你一分钟解决第四步遇到的问题。
系统:Ubuntu 18.04
安装ROS版本:melodic

前四个勾选

打开命令终端,输入以下命令
1.添加ROS源
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
2.添加秘钥
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
3.安装ROS
sudo apt-get update
如果部分不成功更换电脑连接手机热点试试,本人第一次安装就成功了。
sudo apt-get install ros-melodic-desktop-full
大概需要两个多G,如果有足够空间,输入Y进行安装
4.安装并初始化rosdep
sudo apt install python-rosdep python-rosinstall python-rosinstall-generator python-wstool build-essential
sudo rosdep init

rosdep update
但是由于网络原因,大部分小伙伴在执行sudo rosdep init时都会报错无法访问链接,因为rosdepc使用的是国内的源,rosdep初始化失败是因为其使用的是github,国内无法访问。
这里只要更换为小鱼dalao制作的国内镜像rosdepc,即可解决该问题。
wget http://fishros.com/install -O fishros && . fishros
### 上行代码运行后根据提示输入4
### 输入回车
#根据提示rosdep初始化
rosdepc update
#更新ros源


5.设置环境变量
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
6.启动运行小海龟例子
1.第一个终端运行如下命令
roscore

2.打开第二个终端,也可以利用 Ctrl+Shift+T 快捷键打开一个新的终端,运行如下命令,这时你会看见一只静止的小海龟
rosrun turtlesim turtlesim_node

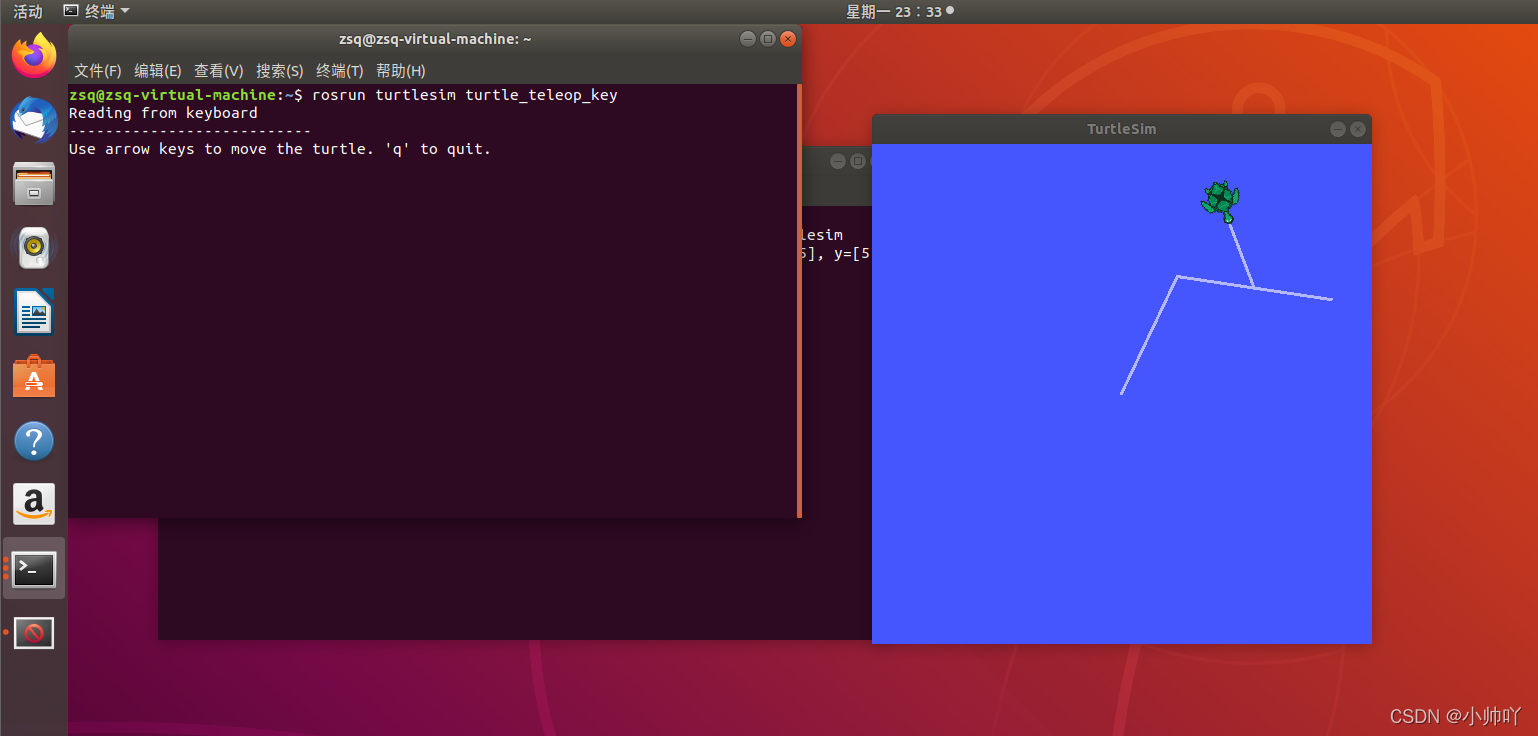
3.如果希望小海龟能够移动,打开第三个终端,或者利用Ctrl+Shift+T快捷键再打开一个新的终端,启动turtlesim的键盘控制节点turtle_teleop_key,运行如下命令
rosrun turtlesim turtle_teleop_key
(这里你的鼠标要停留在当前这个终端界面,按键盘上面的 上下左右 来控制小海龟的移动)
键盘上面的“上下左右” 小海龟移动情况
上 前进
下 后退
左 原地向左转
右 原地向右转

参考:
1.fishros.com
2.https://blog.csdn.net/qq_44830040/article/details/106049992?spm=1001.2014.3001.5506

旨在为数千万中国开发者提供一个无缝且高效的云端环境,以支持学习、使用和贡献开源项目。
更多推荐
 24
24 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)