
欧拉角,轴角,四元数与旋转矩阵详解
入门小菜鸟,希望像做笔记记录自己学的东西,也希望能帮助到同样入门的人,更希望大佬们帮忙纠错啦~侵权立删。
目录
一、欧拉角
1、静态定义
对于在三维空间里的一个参考系,任何坐标系的取向,都可以用三个欧拉角来表现。
🌳参考系又称为实验室参考系,是静止不动的。
🌳坐标系则固定于刚体,随着刚体的旋转而旋转。
来一个经典的示例:
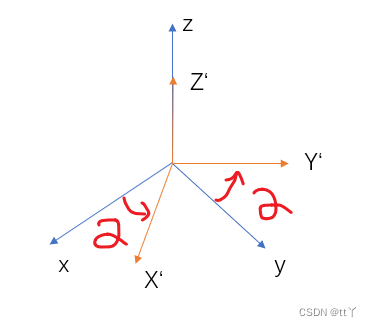
设定xyz-轴为参考系的参考轴(即下图蓝色部分)。称xy-平面与XY-平面的相交为交点线,用英文字母(N)代表。zxz顺规的欧拉角可以静态地这样定义:
α 是 x-轴与交点线的夹角,
β 是z-轴与Z-轴的夹角,
γ 是交点线与X-轴的夹角。

但是对于夹角的顺序和标记,夹角的两个轴的指定,并没有任何常规规定。所以每当用到欧拉角时,我们必须明确表示出夹角的顺序,指定其参考轴
2、欧拉角的表示
首先绕z轴转动α角(如左图),然后是绕X’轴转动β角(如中间的图),最后是绕Z’轴转动γ角(如右图),这是zxz顺规(先绕z轴,再绕x轴再绕z‘轴)的欧拉角表示方法。(除了zxz顺规外还有其他的规定方法,如xyx,zyz。这里不做详述)



欧拉角包括3个旋转,根据这3个旋转来指定一个刚体的朝向。这3个旋转分别绕x轴,y轴和z轴,分别称为 Pitch,Yaw 和 Roll。

3、欧拉角表示的优缺点
🌳优点:
(1)欧拉角由三个角度组成,直观,容易理解。
(2)可以进行从一个方向到另一个方向旋转大于180度的角度。
🌳缺点:
(1)欧拉角是不可传递的,旋转的顺序影响旋转的结果,不同的应用又可能使用不同的旋转顺序,旋转顺序无法统一;
(2)3个旋转的角度可以不受限制,即取值范围是(-inf,inf);
(3)可能造成万向节死锁
4、欧拉角的万向节死锁(静态不存在万向锁的问题)
对于动态欧拉角(绕物体坐标系旋转),无论绕第一,三个轴转动的旋转角为多少度,只要绕第二个轴的旋转角为±90°,就会出现万向锁现象。
万向锁现象:一旦选择±90°作为pitch角,就会导致第一次旋转和第三次旋转等价,整个旋转表示系统被限制在只能绕竖直轴旋转,丢失了一个表示维度。
来个例子:
比如说我们先绕z轴转任意角度,得到下图对吧
然后咱们再绕y轴转90度,得到下图(此时Z’轴在蓝色的x-y平面上)
然后无论我们如何绕X‘轴转动,Z’轴始终在蓝色的x-y平面上,就像是被锁住了一样。

万向锁的避免问题:限制旋转的角度范围——绕第一个轴转动的旋转角限制在±180°间;绕第二个轴限制范围在±90°间。
二、四元数
1、提出意义和定义 (含轴角)
🌳提出意义:上述欧拉角是多次旋转后才能得到,那么为什么不一步到位,只旋转一次呢?那么四元数应运而生。
🌳定义:
对于一个物体的旋转,我们只需要知道四个值:一个旋转的向量 + 一个旋转的角度。而四元数也正是这样的设计:
其中x,y,z 代表的是向量的三维坐标,w代表的是角度
其实,四元数本质上是一个超复数:
🌳轴角
——这种一个轴向量(单位向量)加一个绕转角度的表示方式是轴角表示方法。
轴角最大的一个局限就是不能进行简单的插值;
此外,轴角形式的旋转不能直接施于点或矢量,必转换为矩阵或者四元数。
2、四元数的相关计算法则
(1)加法
(2)乘法
单位四元数——为了表示方便,常规定:
此时复数乘法可以表示为:
![]()
也可以表示为矩阵形式

(3)共轭 ——
3、四元数的极形式
其中 ||q|| 代表了四元数的模,单位四元数模为1,而θ是四元数表示的旋转过程的半角大小,也就是说2θ就是旋转角大小,n则是表示旋转轴方向的单位向量。
4、四元数的使用举例
一个向量:v1,要让它绕 v2 旋转θ度(顺时针转动)
那么有p = (v1, 0); q = ( v2 * sin(θ/2) , cos(θ/2) )
旋转后的四元数为(得到的四元数实部为0,虚部为新的坐标):
5、四元数的优缺点
🌳优点:
- 存储空间小,计算效率高。
- 四元旋转不存在万向节锁问题。
🌳缺点:
- 四元数的数字表示不直观。
- 单个四元数不能表示在任何方向上超过180度的旋转。
三、四元数和欧拉角间的相互转化
1、四元数转为欧拉角
设定——
2、欧拉角转为四元数
我们设
则有:
四、旋转矩阵
假设绕XYZ三个轴旋转的角度分别为 α ,β ,γ ,则三次旋转的旋转矩阵计算方法如下:
若按Z-Y-X旋转顺序(指先绕自身轴Z,再绕自身轴Y,最后绕自身轴X),则旋转矩阵为:
欢迎大家在评论区中批评指正,谢谢~

旨在为数千万中国开发者提供一个无缝且高效的云端环境,以支持学习、使用和贡献开源项目。
更多推荐
 22
22 0
0- 0



 已为社区贡献22条内容
已为社区贡献22条内容

所有评论(0)