
图像语义分割中的上采样(Upsampling)和下采样(subsampling)
图像语义分割中的上采样和下采样1. 下采样和上采样的基本概念最近在看到一篇论文中用到了transposed convolution,并出现了upsampling等概念,表示很迷。那么什么是upsampling ?1. 下采样和上采样的基本概念下采样: 对卷积得到的压缩特征图进行进一步压缩。实际上就是卷积层之间的池化层。作用:通过最大池化或者平均池化从而减少了特征,进而参数的数量,且降低了卷积网络计
图像语义分割中的上采样和下采样
最近在看到一篇论文中用到了transposed convolution,并出现了upsampling等概念,表示很迷。那么什么是upsampling ?
因此作出如下总结仅供自己学习理解。
1. 下采样(subsampled)
下采样:就是对卷积得到的
F
e
a
t
u
r
e
M
a
p
Feature Map
FeatureMap 进行进一步压缩。通俗的所,实际上就是卷积层之间的池化操作。
作用: 通过最大池化或者平均池化从而减少了特征,减少了参数的数量,且降低了卷积网络计算的复杂度;实际上就是过滤作用小、信息冗余的特征,保留关键信息(而信息关键与否就体现在对应像素的value是否被激活的更大)。
下图左边是经过卷积得到的一个Feature Map,卷积后的每一个像素点我理解成:将原始图像中卷积核大小的所有像素点特征糅合到了一个像素点。
通过步长为 2 的最大池化,将被激活程度最大(value最大)的特征筛选出来,而其余相对较小的特征则被去掉,达到降低特征维度的作用。同时还增大了整个网络图所覆盖的感受野。
2. 上采样(upsampled)
就是将提取到的Feature Map进行放大, 从而以更高的分辨率进行显示图像。这里的方法图像放大,并不是简单地方法放大,也不是之前下采样的逆操作。
也就是说上采样放大后输出的图像和下采样之前的图像是不一样的。
常用的上采样方法有两种:
- 双线性插值
- 反卷积
首先看看什么是线性插值吧。
2.1 线性插值
其实线性插值1是一种数学方法,有一阶、二阶、三阶,对应为单线性插值、双线性插值和三线性插值。三者不同之处在于:
- 单线性插值对应两点之间任意一点为插值;
- 双线性插值对应4点形成方形之间的任意一点作为插值;
- 三线性插值对应8点形成立方体内的任意一点作为插值。
2.2 单线性插值
已知中 P 1 P_1 P1点和 P 2 P_2 P2点,坐标分别为 ( x 1 , y 1 ) (x_1, y_1) (x1,y1)、 ( x 2 , y 2 ) (x_2, y_2) (x2,y2),要计算 [ x 1 , x 2 ] [x_1, x_2] [x1,x2] 区间内某一位置 x x x 在直线上的 y y y 值.
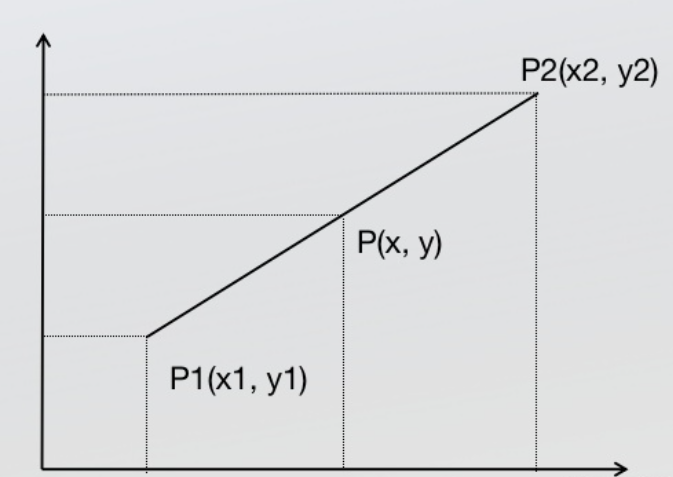
该直线一定满足方程:
( y − y 1 ) ( x − x 1 ) = ( y 2 − y 1 ) ( x 2 − x 1 ) \frac{(y-y_1)}{(x-x_1)} = \frac{(y_2-y_1)}{(x_2-x_1)} (x−x1)(y−y1)=(x2−x1)(y2−y1)
可以化简得到:
y
=
(
x
2
−
x
x
2
−
x
1
)
y
1
+
(
x
−
x
1
x
2
−
x
1
)
y
2
y = (\frac{x_2-x} {x_2-x_1})y_1 + (\frac{x-x_1} {x_2-x_1})y_2
y=(x2−x1x2−x)y1+(x2−x1x−x1)y2
可以看到 y y y的值与 y 1 y_1 y1和 y 2 y_2 y2的各自对应有关,并且对应系数 ( x 2 − x x 2 − x 1 ) (\frac{x_2-x} {x_2-x_1}) (x2−x1x2−x)和 ( x − x 1 x 2 − x 1 ) (\frac{x-x_1} {x_2-x_1}) (x2−x1x−x1)决定了 y 1 y_1 y1 和 y 2 y_2 y2 分别对 y y y 的贡献。
进一步细看, x 1 、 x 2 、 y 1 、 y 2 x_1、x_2、y_1、y_2 x1、x2、y1、y2均已知,则由 x x x 值决定 y y y 走向。
- 当 x x x 越靠近 x 1 x_1 x1,那么 ( x − x 1 x 2 − x 1 ) (\frac{x-x_1} {x_2-x_1}) (x2−x1x−x1)的值就越小,则 y 2 y_2 y2 对 y y y 的贡献越小,反而 y 1 y_1 y1 对 y y y 的贡献越大,所以 y y y 更加靠近 y 1 y_1 y1 的值。
- 当 x x x 越靠近 x 2 x_2 x2,那么 ( x 2 − x x 2 − x 1 ) (\frac{x_2-x} {x_2-x_1}) (x2−x1x2−x)的值就越小,则 y 1 y_1 y1 对 y y y 的贡献越小,反而 y 2 y_2 y2 对 y y y 的贡献越大,所以 y y y 更加靠近 y 2 y_2 y2 的值。
这是根据直线方程的定义求得的结论,但是我们现在在讨论插值。
即考虑如何在某一个坐标点上插入一个合理的像素值。
同样根据插入点与它周围像素点的距离远近,来分配不同权重,进行叠加。
将
y
1
y_1
y1 和
y
2
y_2
y2 换作对应点位置的像素值 即:
f
(
p
1
)
f(p_1)
f(p1) 和
f
(
p
2
)
f(p_2)
f(p2) ,则公式可得:
f ( p ) = ( x 2 − x x 2 − x 1 ) f ( p 1 ) + ( x − x 1 x 2 − x 1 ) f ( p 2 ) f(p) = (\frac{x_2-x} {x_2-x_1})f(p_1) + (\frac{x-x_1} {x_2-x_1})f(p_2) f(p)=(x2−x1x2−x)f(p1)+(x2−x1x−x1)f(p2)
也就是说,插值点离哪一个像素点越近,就与那一个像素点更相关,则更近像素点的权重应当更大。
2.3 双线性插值
然后,根据单线性插值再来介绍下双线性插值方法2。
实际上就是先进行了 2 次横向的单线性插值,然后根据单线性插值的结果进行 1 次纵向的单线性插值。
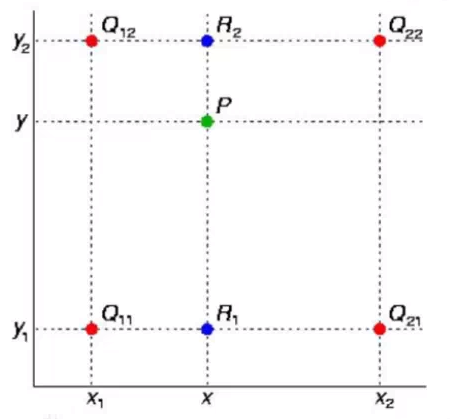
首已知 Q 11 ( x 1 , y 1 ) 、 Q 12 ( x 1 , y 2 ) 、 Q 21 ( x 2 , y 1 ) 、 Q 22 ( x 2 , y 2 ) Q_{11}(x_1,y_1)、Q_{12}(x_1,y_2)、Q_{21}(x_2,y_1)、Q_{22}(x_2,y_2) Q11(x1,y1)、Q12(x1,y2)、Q21(x2,y1)、Q22(x2,y2) 四个点的坐标,设插值坐标点为 ( x , y ) (x,y) (x,y),像素为 z z z
现在固定 x x x ,计算 y y y 的位置。
- 首先根据 Q 11 、 Q 21 Q_{11}、Q_{21} Q11、Q21计算出 R 1 ( x , y 1 ) R_1(x,y_1) R1(x,y1)的像素值;
- 再根据 Q 12 、 Q 22 Q_{12}、Q_{22} Q12、Q22计算出 R 2 ( x , y 2 ) R_2(x,y_2) R2(x,y2)的像素值;
- 最后再依据 R 1 R_1 R1、 R 1 R_1 R1得到 p p p 的像素插值 z z z。
根据单线性插值的结论公式,可以直接得出结果1:
f
(
R
1
)
=
(
x
2
−
x
x
2
−
x
1
)
f
(
Q
11
)
+
(
x
−
x
1
x
2
−
x
1
)
f
(
Q
21
)
f(R_1) = (\frac{x_2-x} {x_2-x_1})f(Q_{11}) + (\frac{x-x_1} {x_2-x_1})f(Q_{21})
f(R1)=(x2−x1x2−x)f(Q11)+(x2−x1x−x1)f(Q21)
f
(
R
2
)
=
(
x
2
−
x
x
2
−
x
1
)
f
(
Q
12
)
+
(
x
−
x
1
x
2
−
x
1
)
f
(
Q
22
)
f(R_2) = (\frac{x_2-x} {x_2-x_1})f(Q_{12}) + (\frac{x-x_1} {x_2-x_1})f(Q_{22})
f(R2)=(x2−x1x2−x)f(Q12)+(x2−x1x−x1)f(Q22)
再根据
f
(
R
1
)
、
f
(
R
2
)
f(R_1)、f(R_2)
f(R1)、f(R2)进行纵向单线性插值,可得结果2:
f
(
p
)
=
(
y
2
−
y
y
2
−
y
1
)
f
(
R
1
)
+
(
y
−
y
1
y
2
−
y
1
)
f
(
R
2
)
f(p) = (\frac{y_2-y}{y_2-y_1})f(R_1) + (\frac{y-y_1}{y_2-y_1})f(R_2)
f(p)=(y2−y1y2−y)f(R1)+(y2−y1y−y1)f(R2)
将结果1代入结果2中,可得:
f
(
p
)
=
(
y
2
−
y
y
2
−
y
1
)
(
x
2
−
x
x
2
−
x
1
)
f
(
Q
11
)
+
(
y
2
−
y
y
2
−
y
1
)
(
x
−
x
1
x
2
−
x
1
)
f
(
Q
21
)
+
(
y
−
y
1
y
2
−
y
1
)
(
x
2
−
x
x
2
−
x
1
)
f
(
Q
12
)
+
(
y
−
y
1
y
2
−
y
1
)
(
x
−
x
1
x
2
−
x
1
)
f
(
Q
22
)
f(p) = (\frac{y_2-y}{y_2-y_1}) (\frac{x_2-x} {x_2-x_1})f(Q_{11}) + (\frac{y_2-y}{y_2-y_1}) (\frac{x-x_1} {x_2-x_1})f(Q_{21}) + (\frac{y-y_1}{y_2-y_1}) (\frac{x_2-x} {x_2-x_1})f(Q_{12}) + (\frac{y-y_1}{y_2-y_1})(\frac{x-x_1} {x_2-x_1})f(Q_{22})
f(p)=(y2−y1y2−y)(x2−x1x2−x)f(Q11)+(y2−y1y2−y)(x2−x1x−x1)f(Q21)+(y2−y1y−y1)(x2−x1x2−x)f(Q12)+(y2−y1y−y1)(x2−x1x−x1)f(Q22)
可以简化得:
f
(
p
)
=
w
11
f
(
Q
11
)
+
w
21
f
(
Q
21
)
+
w
12
f
(
Q
12
)
+
w
22
f
(
Q
22
)
f(p) = w_{11}f(Q_{11}) + w_{21}f(Q_{21}) + w_{12}f(Q_{12}) + w_{22}f(Q_{22})
f(p)=w11f(Q11)+w21f(Q21)+w12f(Q12)+w22f(Q22)
其中
w
11
、
w
21
、
w
12
、
w
22
w_{11}、w_{21}、w_{12}、w_{22}
w11、w21、w12、w22分别表示四个点对点
p
p
p上像素的一个权重比,这是根据训练得出来的。
根据结果可得,双线性插值和前面提到的定义 (双线性插值对应4点形成方形之间的任意一点作为插值) 刚好对应。
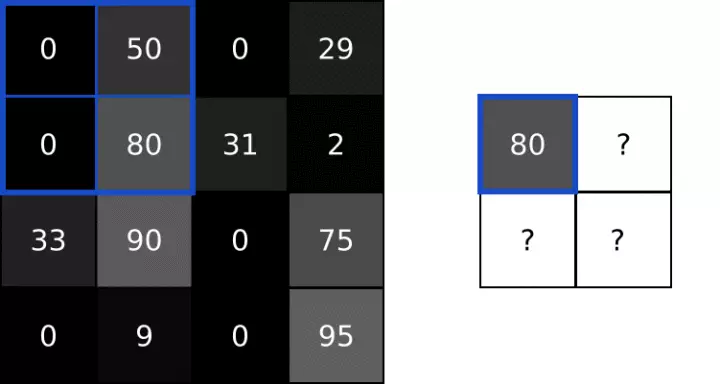
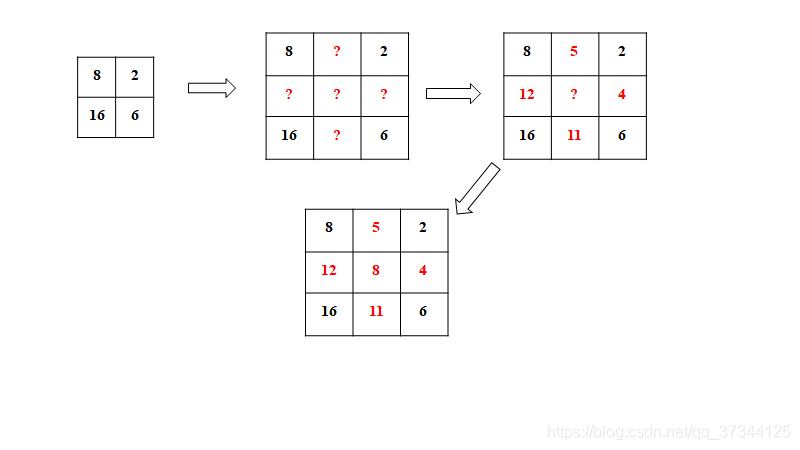
2.4 双线性插值举例
这里假设按照取平均的准则,进行插值计算,即 w 11 、 w 21 、 w 12 、 w 22 w_{11}、w_{21}、w_{12}、w_{22} w11、w21、w12、w22均为 0.5 0.5 0.5
2.5 插值法总结
在原有图像像素的基础上,在像素点之间采用合适的插值算法插入新的元素3。
插值就是在不生成像素的情况下增加图像像素大小的一种方法,在周围像素色彩的基础上用数学公式计算丢失像素的色彩(也有的有些相机使用插值,人为地增加图像的分辨率)。
所以在放大图像时,图像看上去会比较平滑、干净。但必须注意的是插值并不能增加图像信息。
2.6 转置卷积(Transposed Convolution)
其实转置卷积还有更通俗的说法,叫做反卷积(Deconvolution)。
转置卷积实际上是通过卷积运算实现分辨率还原。因为卷积操作中有权重参数,所以这是一种可以学习的方法,通过参数的学习实现输出图像尽可能与原图像相似。
和传统的卷积运算相比:
- 相同点:都是根据卷积核进行卷积运算;
- 不同点:普通卷积通过padding然后卷积是为了提取特征,使Feature Map变小,提取出更加复杂的特征;而在转置卷积中的stride存在不同,在输入图像的每两个像素之间增加大小为stirde的空像素,和空洞卷积的空洞操作是一样的。并且通过转置卷积,有使得Feature Map尺寸变大的效果。
即前者提取高级特征,后者放大高级特征。
具体给一些常见的例子4:

|

|

|
|
| No padding, no strides, transposed | Arbitrary padding, no strides, transposed | Half padding, no strides, transposed | Full padding, no strides, transposed |

|

|
| |
| No padding, strides, transposed | Padding, strides, transposed | Padding, strides, transposed (odd) |
可以注意到第一行的四张图都是no strides,所以和不同的卷积类似;
而第二行的strides设置为2,所以两两像素之间存在一个空像素,即 0 的个数为
s
t
r
i
d
e
s
−
1
strides - 1
strides−1。
这样对像素周围进行补0的方式就是最简单的反卷积。
另外也可以看看这一篇总结的反卷积,感觉写的不错,有对应的实际Demo。
但是这样的补0操作会使得像素边缘信息不断丢失。 F C N FCN FCN 5中通过相加的方式很好地解决了这类特征信息不足问题。
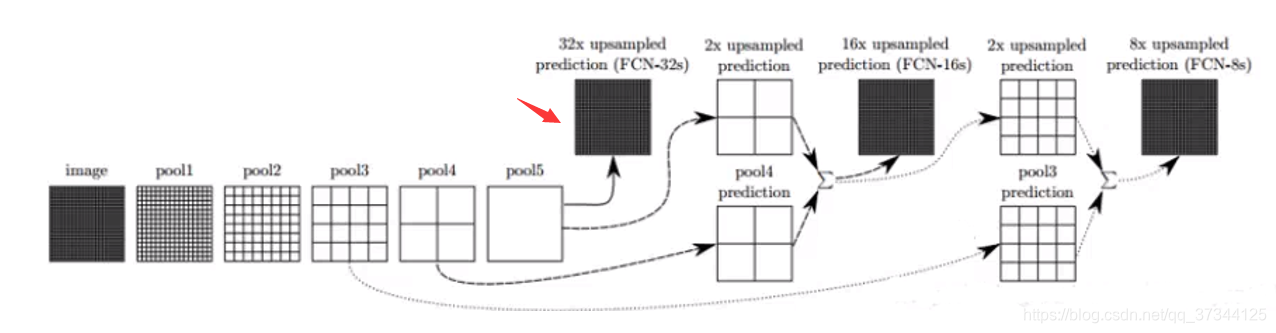
3. FCN (Fully Convolutional Networks)
全卷积神经网络(full Convolutional neural network, FCN)是一个普通的CNN,其中最后一个全连接层被另一个具有较大“感受野”的卷积层所取代。这样做是为了捕捉全局背景的整体信息(告诉我们图像中有什么,并且给出一些物体位置的粗略描述)。

如上图中, i m a g e image image 为原始图像 ( 32 ∗ 32 ) (32*32) (32∗32),有 p o o l 1 、 p o o l 2 、 p o o l 3 、 p o o l 4 、 p o o l 5 pool1、pool2、pool3、pool4、pool5 pool1、pool2、pool3、pool4、pool5 五次卷积得到的 F e a t u r e M a p Feature Map FeatureMap
首先看到 p o o l 5 pool5 pool5,是通过原始图像经过了 5 次下采样操作,得到的 1 ∗ 1 1*1 1∗1的 F e a t u r e M a p Feature Map FeatureMap,包含了高纬度的特征信息。直接将该 F e a t u r e M a p Feature Map FeatureMap 通过上采样放大 32 倍,还原到原始图片大小,得到了 32 x 32x 32x u p s a m p l e d upsampled upsampled p r e d i c t i o n prediction prediction 的结果,如下图红色箭头指向所示:
因为在
F
C
N
FCN
FCN 中每下采样一次,图像的边缘信息在不断减少,而图像的更高维度特征则会被学习到,为了同时包含低纬度和高纬度特征图的的不同特点,因此提出了一个相加的操作。
也就是说不仅只考虑高纬度的
F
e
a
t
u
r
e
M
a
p
Feature Map
FeatureMap ,因此
F
C
N
FCN
FCN 做出如下操作:
- 将 p o o l 5 pool5 pool5 的特征进行两倍大小的上采样放大,即得到图中的 2 x 2x 2x u p s a m p l e d upsampled upsampled p r e d i c t i o n prediction prediction,此时的 F e a t u r e M a p Feature Map FeatureMap 大小和 p o o l 4 pool4 pool4 的大小一致;
- 因为 p o o l 5 pool5 pool5 中保存了最高维度的特征信息, p o o l 4 pool4 pool4 中保存了次高维度的特征信息,然后将这两个 F e a t u r e M a p Feature Map FeatureMap 进行相加;
- 将相加的结果进行16倍的上采样放大,即得到图中的 16 x 16x 16x u p s a m p l e d upsampled upsampled p r e d i c t i o n prediction prediction,此时的 F e a t u r e M a p Feature Map FeatureMap 大小也和原始输入图像一致。
通过上面三个步骤得到的图像同时保存了 p o o l 4 pool4 pool4 和 p o o l 5 pool5 pool5 两个维度级别的特征。
依次类推,把 p o o l 3 、 p o o l 4 、 p o o l 5 pool3、 pool4、pool5 pool3、pool4、pool5 的维度特征也进行叠加,然后对比各自不同叠加情况的预测效果,取最优情况,这就是 F C N FCN FCN 最经典的一个原理流程。
最后其实我还是对转置卷积的运算有些不理解,如果有道友懂的可以一起聊聊,我也等后续理解了在进行补充吧!

旨在为数千万中国开发者提供一个无缝且高效的云端环境,以支持学习、使用和贡献开源项目。
更多推荐



 69
69 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)