
ROS——一文读懂:rosbag
·
ros1
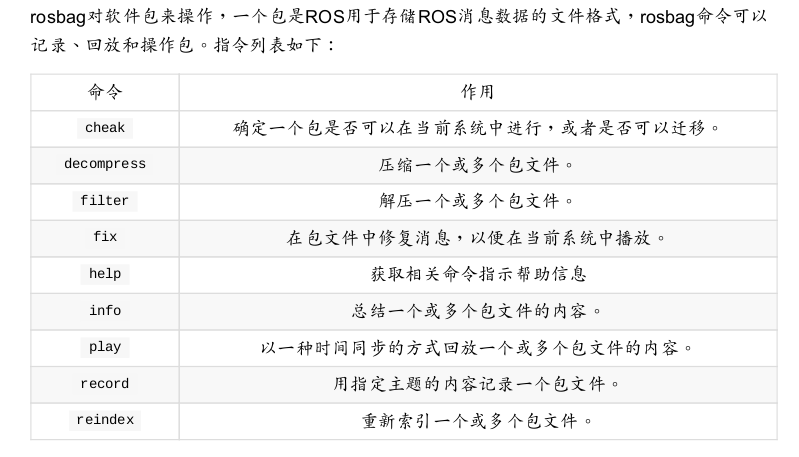
rosbag的命令

rosbag简介
rosbag 既可以指命令行中数据包相关命令,也可以指 c++/python 的 rosbag 库。这里的 rosbag 是指前者。
rosbag 主要用于记录、回放、分析 rostopic 中的数据。它可以将指定 rostopic 中的数据记录到 .bag 后缀的数据包中,便于对其中的数据进行离线分析和处理。
对于 subscribe 某个 topic 的节点来说,它无法区分这个 topic 中的数据到底是实时获取的数据还是从 rosbag 中回放的数据。这就有助于我们基于离线数据快速重现曾经的实际场景,进行可重复、低成本的分析和调试。
rosbag record
启动与 turtlesim 相关的两个 ros node
roscore
rosrun turtlesim turtlesim_node
rosrun turtlesim turtle_teleop_key
cd ~/bagfiles
rosbag record -a
-a 选项表示将当前发布的所有 topic 数据都录制保存到一个 rosbag 文件中,录制的数据包名字为日期加时间。
也可以只记录某些感兴趣的 topic
rosbag record /topic_name1 /topic_name2 /topic_name3
如果要指定生成数据包的名字,则用-O /-o 参数,如下:
rosbag record -O filename.bag /topic_name1
如果在 launch 文件中使用 rosbag record 命令,如下:
<node pkg="rosbag" type="record" name="bag_record" args="/topic1 /topic2"/>
rosbag info
rosbag info指令可以显示数据包中的信息:
rosbag info filename.bag
显示类似下边的信息:
xiaohu@xiaohu:~/bagfiles$ rosbag info 1.bag
path: 1.bag
version: 2.0
duration: 3.3s
start: Aug 24 2019 21:37:53.35 (1566653873.35)
end: Aug 24 2019 21:37:56.65 (1566653876.65)
size: 7.9 KB
messages: 20
compression: none [1/1 chunks]
types: geometry_msgs/Twist [9f195f881246fdfa2798d1d3eebca84a]
topics: /turtle1/cmd_vel 20 msgs : geometry_msgs/Twist
Print information in YAML format.
rosbag info -y filename.bag
xiaohu@xiaohu:~/bagfiles$ rosbag info -y 1.bag
path: 1.bag
version: 2.0
duration: 3.295966
start: 1566653873.351150
end: 1566653876.647117
size: 8103
messages: 20
indexed: True
compression: none
types:
- type: geometry_msgs/Twist
md5: 9f195f881246fdfa2798d1d3eebca84a
topics:
- topic: /turtle1/cmd_vel
type: geometry_msgs/Twist
messages: 20
rosbag play
接下来回放数据包中的 topic。
保留turtlesim节点继续运行。
rosbag play <bagfile>
如果想改变消息的发布速率,可以用下面的命令,-r 后面的数字对应播放速率。
rosbag play -r 2 <bagfile>
如果希望 rosbag 循环播放,可以用命令
rosbag play -l <bagfile> # -l== --loop
如果只播放感兴趣的 topic ,则用命令
rosbag play <bagfile> --topic /topic1
在上述播放命令执行期间,空格键可以暂停播放。
如果想修改topic名字播放
rosbag play file.bag /topic_name:=/reame_topic_name
#//topic_name是原topic,reame_topic_name是新topic
ros2
用ros2 topic echo命令时指定监听的消息类型,例如:
ros2 topic echo /test_publish_compressimage sensor_msgs/msg/CompressedImage

旨在为数千万中国开发者提供一个无缝且高效的云端环境,以支持学习、使用和贡献开源项目。
更多推荐
 61
61 0
0- 0



 已为社区贡献6条内容
已为社区贡献6条内容

所有评论(0)