
现代信号处理——AR模型谱估计
现代信号处理——AR模型谱估计
AR谱估计方法可归结为求解AR模型系数或线性预测器系数的问题。
AR模型参数估计方法:信号预测误差最小原则(或预测误差功率最小)
自相关法(Levison递推法)
Burg法
协方差法
修正协方差法(前后向线性预测最小二乘法)
一、AR的Yule-Walker方法


由高斯白噪声的性质可得:

因此
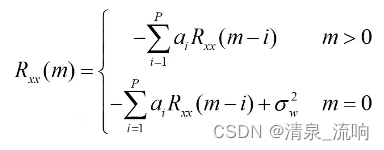
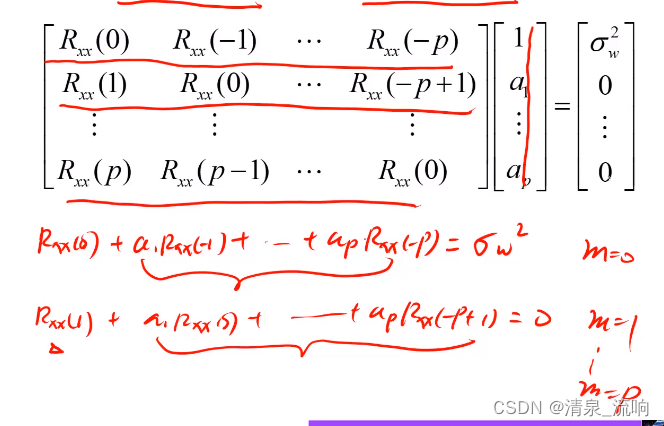
m=0,...,p,m取一个值对应一个方程
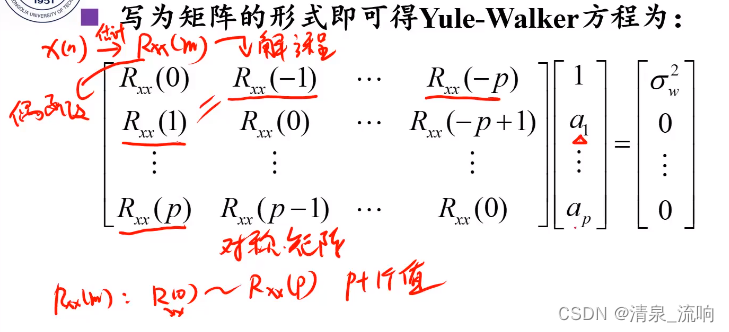
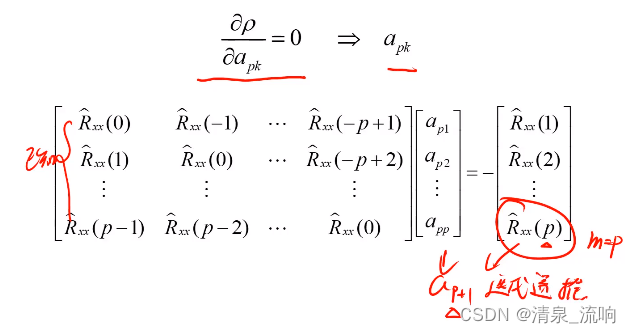
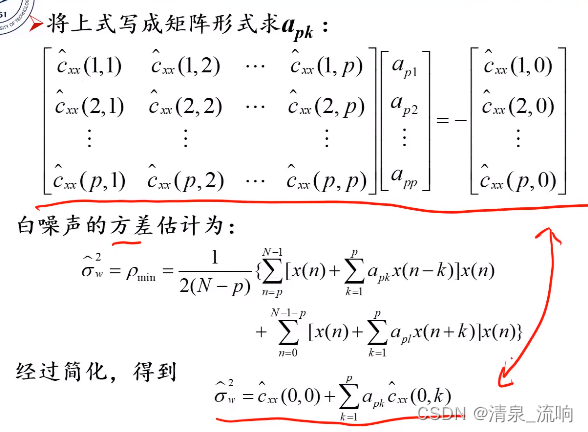
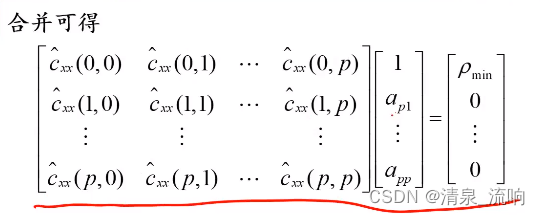
写为矩阵的形式即可得Yule-Walker方程为:
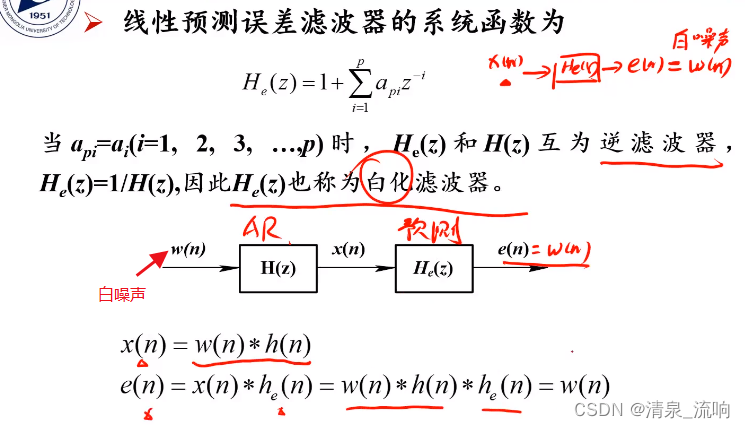
二、AR模型与线性预测的等效性
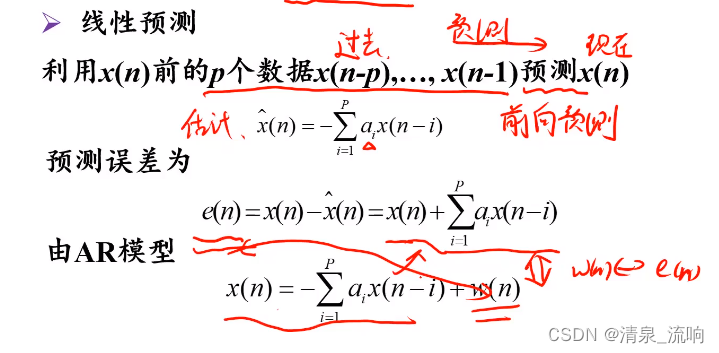
如果AR模型的参数与预测模型的系数相同,则预测误差为白噪声w(n)。

He(z)系统将任意的输入信号转换成白噪声输出,因此该系统称为白化滤波器
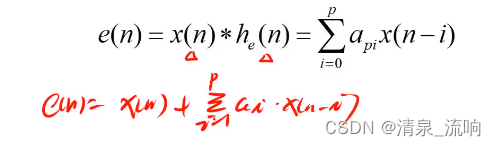
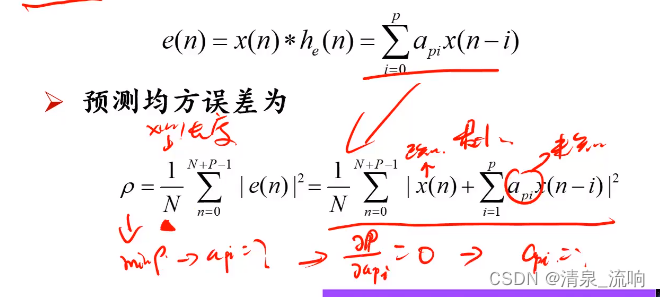
预测均方误差(误差平方的均值)为

预测系数可以由预测均方误差最小获得,即

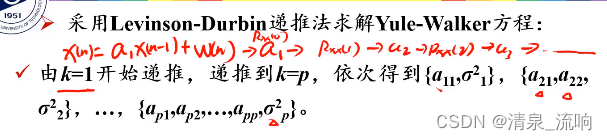
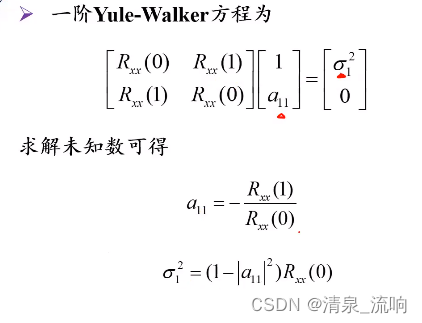
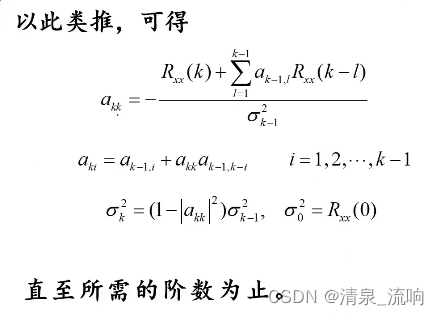
三、自相关法—Levinson-Durbin递推

估计方法:自相关法的出发点是选择AR模型的参数使预测误差功率最小;采用Levison-Durbin递推方法求解Yule-Walker方程得到AR模型参数。

假设信号x(n)的数据区间在0≤n≤N-1范围,有P个预测系数,N个数据经过冲激响应为 (i=0,1,2,….,P)的滤波器,输出预测误差e(n)的长度为N+P,因此应用下式计算:
预测误差功率最小,得到
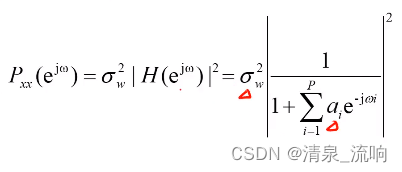
AR模型的各个系数以及模型输入白噪声方差求出后,信号功率谱用下式计算:


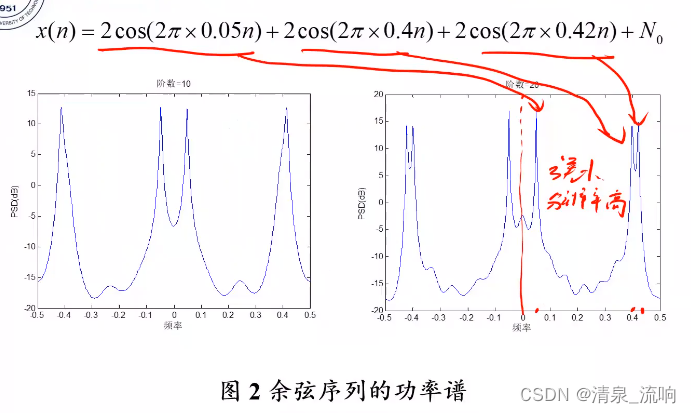
性能分析:该方法需要基于有限的观测数据估计自相关序列,当数据长度较短时,估计误差会比较大,AR参数的计算就会引入很大的误差。从而导致功率谱估计出现谱线分裂与谱峰频率偏移等现象。自相关估计的准确,则AR模型功率谱估计准确,而自相关估计的准确性取决于样本数据的长短。

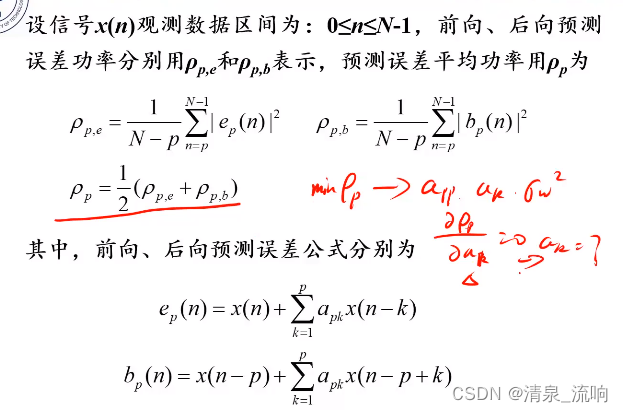
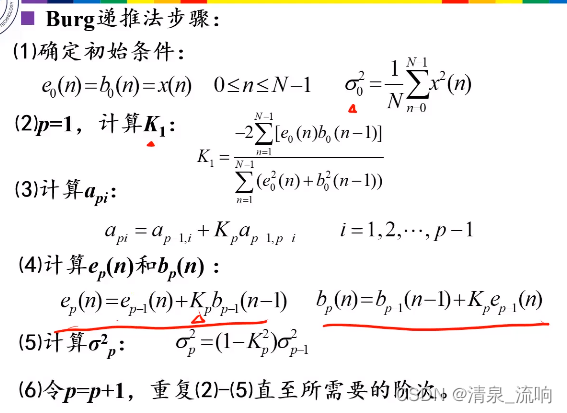
四、伯格(Burg)递推法

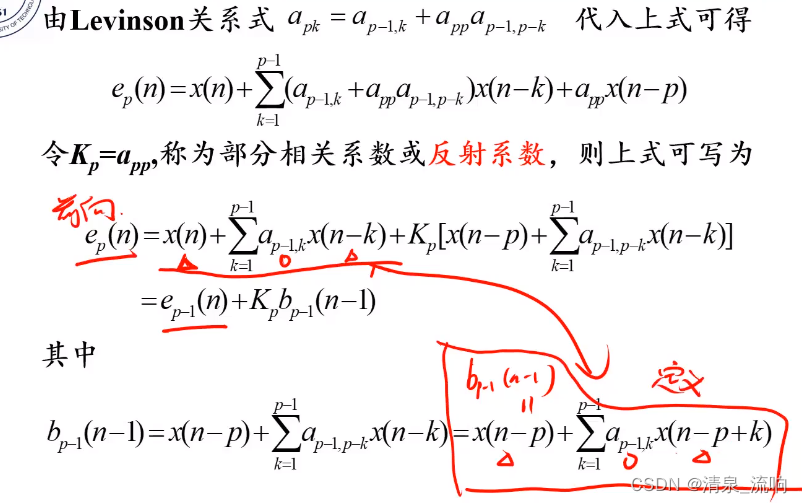

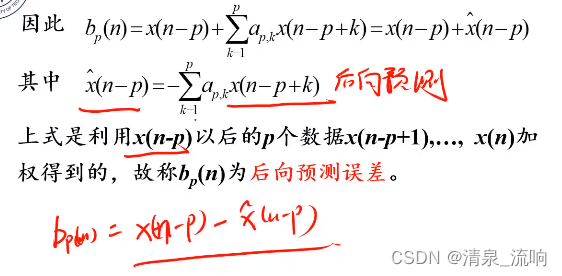

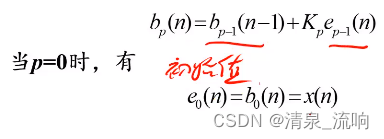
类似于前向预测误差,后向预测误差也有递推公式:
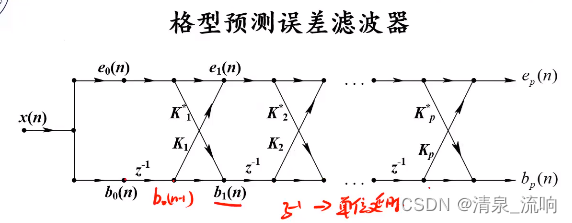
在输入信号平稳的条件下,格型预测误差滤波器前后各级的输出误差是正交的,因此全局最优可由各级局部最优来等效。
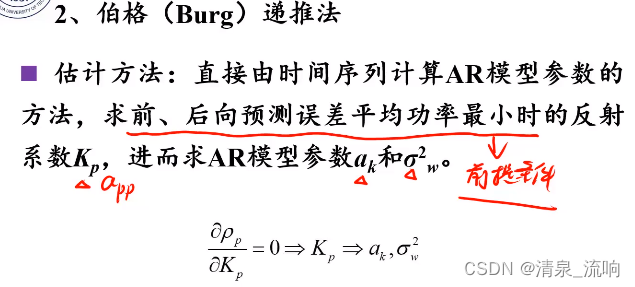

基于反射系数Kp,由Levinson-Durbin递推关系求AR模型参数和
,进而求得功率谱Pxx 。
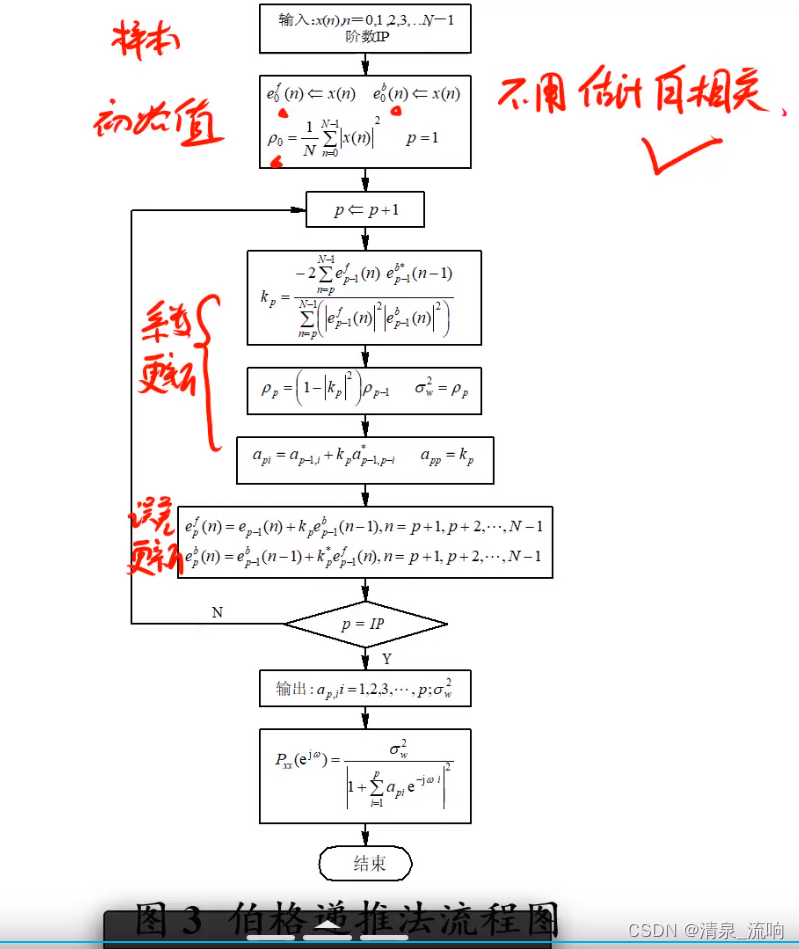
性能分析:该方法避免了采用有限数据估计自相关函数的计算,适合短序列参数估计,克服了L-D递推中的某些缺点,计算量小。
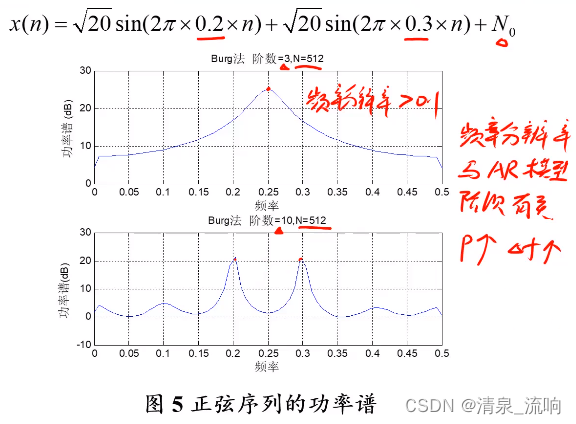
但对正弦信号的谱估计,仍存在某些谱线分裂与频率偏移现象。

五、协方差法与修正协方差法
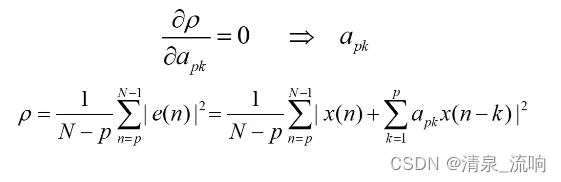
1、协方差法
估计方法:利用使预测误差功率最小的方法求模型参数
该公式中使用的观测数据均已得到,不需要在数据两端补充零点,因此比较自相关法去掉了加窗处理的不合理假设。

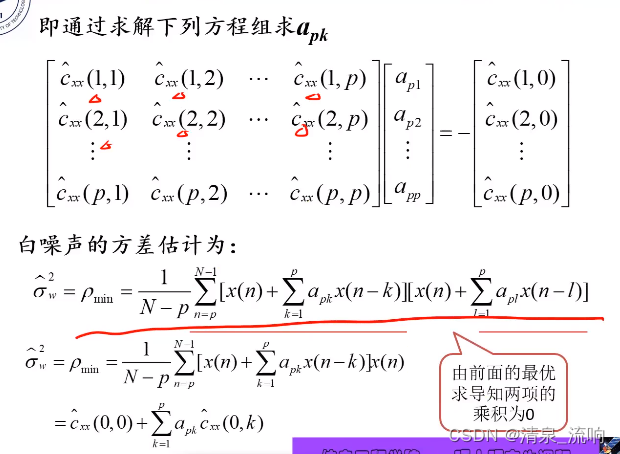

性能分析:上述协方差矩阵不具备对称性,无法采用递推算法计算;适用于非平稳信号;一些实验结果说明它的分辨率优于自相关法,另外对于纯正弦信号数据,可以有效地估计正弦信号的频率。
2、修正协方差法(前后向线性预测最小二乘法)
估计方法:修正协方差法使用前向和后向预测误差平均值最小的方法,估计AR模型的参数,进而估计信号的功率谱。



性能分析:该方法虽然与协方差方法的形式相同,但数据量增加了一倍,对于处理长度较短的数据有利;该方法要求信号在正反方向具有相同的特性,如正弦信号;该方法也适用于非平稳信号。
几种方法的比较:
自相关法可以用Levinson递推算法,运算量小,但分辨率受窗长度的限制;
Burg算法,可用改进的Levinson递推算法,分辨率高,但对正弦信号存在谱线分裂和偏移现象;
协方差法,去除了自相关法加窗处理的不合理假设,分辨率高,运算量较大;
修正协方差法,分辨率高,在谱线分裂和偏移上较Burg法有较大改善,运算量大。
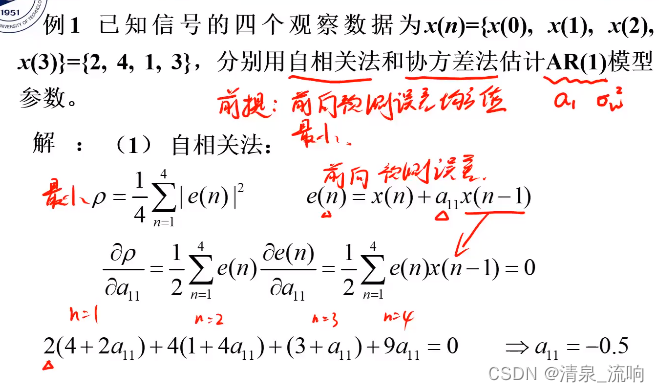
例:已知信号的四个观察数据为x(n)={x(0),x(1),x(2),x(3)}={2,4,1,3},分别用自相关法和协方差法估计AR(1)模型参数。

参考视频:
https://www.bilibili.com/video/BV1wS4y1D7ng?p=6&vd_source=77c874a500ef21df351103560dada737

旨在为数千万中国开发者提供一个无缝且高效的云端环境,以支持学习、使用和贡献开源项目。
更多推荐



 18
18 0
0- 0



 已为社区贡献17条内容
已为社区贡献17条内容

所有评论(0)