
LSTM/GRU详细代码解析+完整代码实现
LSTM和GRU目前被广泛的应用在各种预测场景中,并与卷积神经网络CNN或者图神经网络GCN等相结合,对数据的结构特征和时序特征进行提取,从而预测下一时刻的数据。在这里整理一下详细的LSTM/GRU的代码。
LSTM和GRU目前被广泛的应用在各种预测场景中,并与卷积神经网络CNN或者图神经网络GCN这里等相结合,对数据的结构特征和时序特征进行提取,从而预测下一时刻的数据。在这里整理一下详细的LSTM/GRU的代码,并基于heatmap热力图实现对结果的展示。
一、GRU
GRU的公式如下图所示:
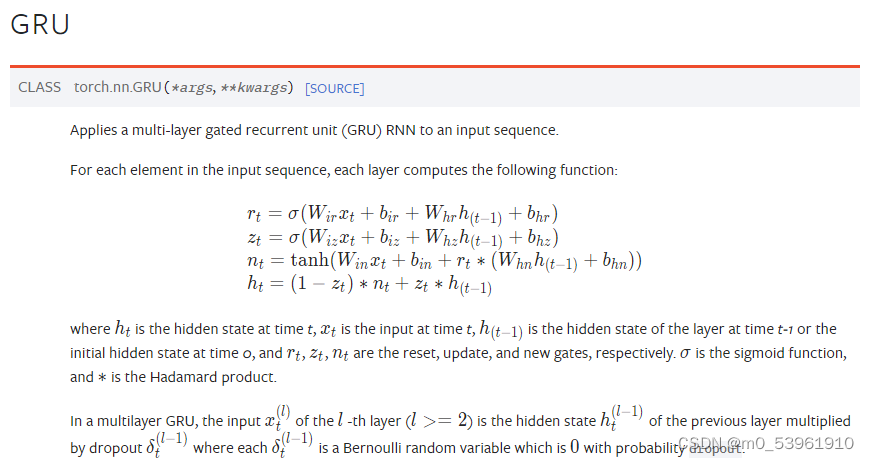
其代码部分:
class GRU(torch.nn.Module):
def __init__(self, hidden_size, output_size, num_layers):
super().__init__()
self.input_size = 1
self.hidden_size = hidden_size
self.num_layers = num_layers
self.output_size = output_size
self.num_directions = 1
self.gru = torch.nn.GRU(self.input_size, self.hidden_size, self.num_layers, batch_first=True)
self.linear = torch.nn.Linear(self.hidden_size, self.output_size)
def forward(self, input_seq):
# input(batch_size, seq_len, input_size)
batch_size, seq_len = input_seq.shape[0], input_seq.shape[1]
h_0 = torch.randn(self.num_directions * self.num_layers, batch_size, self.hidden_size).to(device)
# output(batch_size, seq_len, num_directions * hidden_size)
output, _ = self.gru(input_seq, (h_0))
pred = self.linear(output)
pred = pred[:, -1, :]
return pred这里主要对里面主要的五个参数进行介绍:
input_size:输入节点特征的维度。这里需要注意的是,如果你输入的是节点的交通流量数据,一般只使用一个值表示,那么你的input_size为1;若是想基于该节点在t时刻的多个特征,如:流量、速度、车辆数这三个指标对交通流量进行预测,这是input_size=3。
hidden_size:隐藏层数,也就是可调参数。该值决定了模型的预测效果,计算复杂度。
num_layers:堆叠的GRU的层数,num_layers=2说明堆叠了两层GRU,第一层GRU输出的隐藏特征h会作为第二层GRU的数据再进行一次计算。
batch_first:主要为了规范输入数据各个维度所代表的含义。这里其实只需要记住一种情况即可,batch_first=True代表输入数据的三个维度分别代表input(batch_size, seq_len, input_size),输出数据的三个维度分别代表output(batch_size, seq_len, num_directions * hidden_size)。
bidirectional:bidirectional=True代表双向GRU,在计算时,GRU不仅按从0到t的顺序对数据进行计算,还会按照从t到0的顺序对数据进行二次计算。
注:这里需要注意input_size和seq_len的区别,input_size代表某个时间t,节点特征的维度;seq_len则代表你要基于多长的历史数据对未来的数据状态进行预测。
二、LSTM
LSTM公式如下:

其代码部分:
class LSTM(torch.nn.Module):
def __init__(self, hidden_size, output_size):
super().__init__()
self.input_size = 1
self.hidden_size = hidden_size
self.num_layers = 1
self.output_size = output_size
self.num_directions = 1 # 单向LSTM
self.lstm = torch.nn.LSTM(self.input_size, self.hidden_size, self.num_layers, batch_first=True)
self.lin = torch.nn.Linear(self.hidden_size, self.output_size)
def forward(self, input_seq):
batch_size, seq_len = input_seq.shape[0], input_seq.shape[1]
# input(batch_size, seq_len, input_size)
h_0 = torch.zeros(self.num_directions * self.num_layers, batch_size, self.hidden_size).to(device)
c_0 = torch.zeros(self.num_directions * self.num_layers, batch_size, self.hidden_size).to(device)
# output(batch_size, seq_len, num_directions * hidden_size)
output, _ = self.lstm(input_seq, (h_0.detach(), c_0.detach()))
pred = output[:, -1, :]
pred = self.lin(pred)
return pred这里其实只是比GRU代码中多了一段对c_0状态的初始化描述,其他部分是一样的这里不在赘述。
三、基于GRU的完整代码及结果展示
import numpy as np
import pandas as pd
import torch
from torch.utils.data import Dataset, DataLoader
import matplotlib.pyplot as plt
from tqdm import tqdm
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
value = pd.read_csv(r'dataset/A5M.txt', header=None)#(14772, 1)
time = pd.date_range(start='200411190930', periods=len(value), freq='5min')
ts = pd.Series(value.iloc[:, 0].values, index=time)
ts_sample_h = ts.resample('H').sum()
# plt.plot(ts_sample_h)
# plt.xlabel("Time")
# plt.ylabel("traffic demand")
# plt.title("resample history traffic demand from 5M to H")
# plt.show()
class MyDataset(Dataset):
def __init__(self, data):
self.data = data
def __getitem__(self, item):
return self.data[item]
def __len__(self):
return len(self.data)
def nn_seq_us(B):
dataset = ts_sample_h
# split
train = dataset[:int(len(dataset) * 0.7)]
test = dataset[int(len(dataset) * 0.7):]
m, n = np.max(train.values), np.min(train.values)
# print(m,n)
def process(data, batch_size, shuffle):
load = data
load = (load - n) / (m - n)
seq = []
for i in range(len(data) - 6):
train_seq = []
train_label = []
for j in range(i, i + 6):
x = [load[j]]
train_seq.append(x)
train_label.append(load[i + 6])
train_seq = torch.FloatTensor(train_seq)
train_label = torch.FloatTensor(train_label).view(-1)
seq.append((train_seq, train_label))
seq = MyDataset(seq)
seq = DataLoader(dataset=seq, batch_size=batch_size, shuffle=shuffle, num_workers=0, drop_last=False)
return seq
Dtr = process(train, B, False)
Dte = process(test, B, False)
return Dtr, Dte, m, n
class GRU(torch.nn.Module):
def __init__(self, hidden_size, num_layers):
super().__init__()
self.input_size = 1
self.hidden_size = hidden_size
self.num_layers = num_layers
self.output_size = 1
self.num_directions = 1
self.gru = torch.nn.GRU(self.input_size, self.hidden_size, self.num_layers, batch_first=True)
self.linear = torch.nn.Linear(self.hidden_size, self.output_size)
def forward(self, input_seq):
batch_size, seq_len = input_seq.shape[0], input_seq.shape[1]
h_0 = torch.randn(self.num_directions * self.num_layers, batch_size, self.hidden_size).to(device)
# output(batch_size, seq_len, num_directions * hidden_size)
output, _ = self.gru(input_seq, (h_0))
pred = self.linear(output)
pred = pred[:, -1, :]
return pred
Dtr, Dte, m, n= nn_seq_us(64)
hidden_size, num_layers = 10, 2
model = GRU(hidden_size, num_layers).to(device)
loss_function = torch.nn.MSELoss().to(device)
optimizer = torch.optim.Adam(model.parameters(), lr=0.01, weight_decay=1.5e-3)
# training
trainloss_list = []
model.train()
for epoch in tqdm(range(50)):
train_loss = []
for (seq, label) in Dtr:
seq = seq.to(device)#torch.Size([64, 80, 1])
label = label.to(device)#torch.Size([64, 1])
y_pred = model(seq)
loss = loss_function(y_pred, label)
train_loss.append(loss.item())
optimizer.zero_grad()
loss.backward()
optimizer.step()
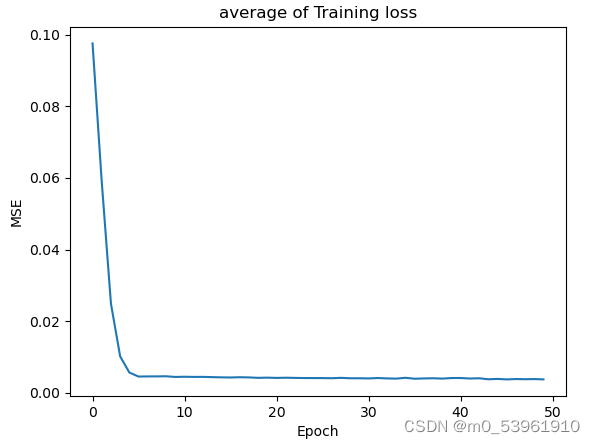
trainloss_list.append(np.mean(train_loss))
# training_loss的图
plt.plot(trainloss_list)
plt.xlabel("Epoch")
plt.ylabel("MSE")
plt.title("average of Training loss")
plt.show()
pred = []
y = []
model.eval()
for (seq, target) in Dte:
seq = seq.to(device)
target = target.to(device)
y_pred = model(seq)
pred.append(y_pred)
y.append(target)
y=torch.cat(y, dim=0)
pred=torch.cat(pred, dim=0)
y = (m - n) * y + n
pred = (m - n) * pred + n#torch.Size([179, 1])
print('MSE:', loss_function(y, pred))
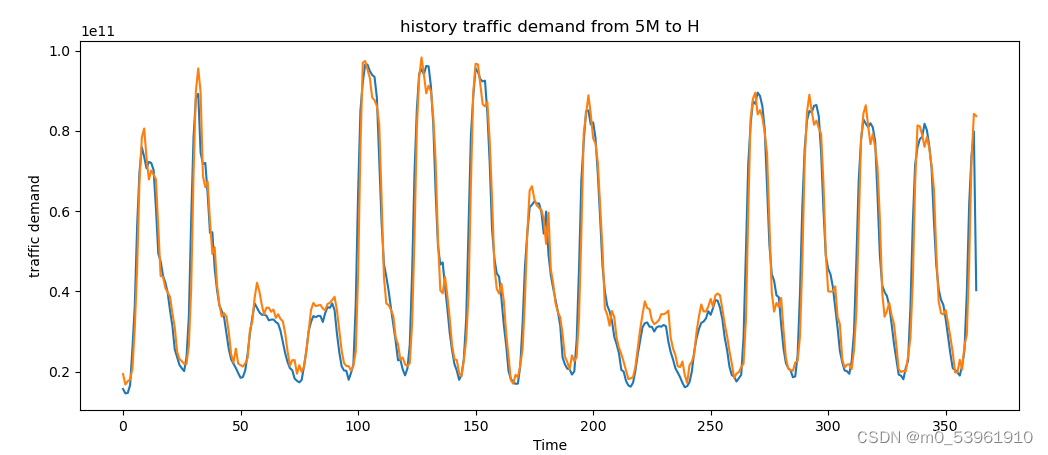
# plot
plt.plot(y.cpu().detach().numpy(), label='ground-truth')
plt.plot(pred.cpu().detach().numpy(), label='prediction')
plt.xlabel("Time")
plt.ylabel("traffic demand")
plt.title("history traffic demand from 5M to H")
plt.show()

旨在为数千万中国开发者提供一个无缝且高效的云端环境,以支持学习、使用和贡献开源项目。
更多推荐



 23
23 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)