
深度学习之图像分类(十八)-- Vision Transformer(ViT)网络详解
深度学习之图像分类(十八)Vision Transformer(ViT)网络详解
目录
上节有讲 Transformer 中的 Self-Attention 结构。本节学习 Vision Transformer(vit) 详解。学习视频源于 Bilibili,参考博客 Vision Transformer详解。

1. 前言
ViT 其原始论文为 An Image Is Worth 16x16 Words: Transformers For Image Recognition At Scale。首先看一下 ViT 模型的效果,在 ImageNet 1k 上最高能达到 88.55 的准确率,关键是现在自家的数据集上进行了预训练,三亿数据量啊。

2. ViT 模型架构
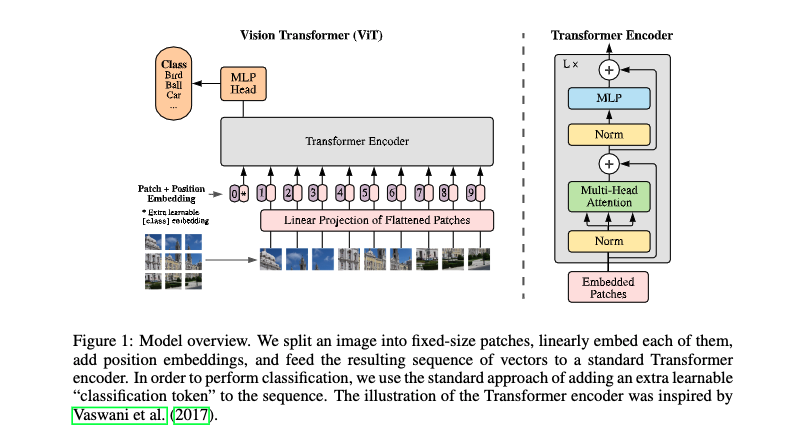
其原始架构图如下所示,可以看到首先输入图片分为很多 patch,论文中为 16。将 patch 输入一个 Linear Projection of Flattened Patches 这个 Embedding 层,就会得到一个个向量,通常就称作 token。紧接着在一系列 token 的前面加上加上一个新的 token(类别token,有点像输入给 Transformer Decoder 的 START,就是对应着 * 那个位置),此外还需要加上位置的信息,对应着 0~9。然后输入到 Transformer Encoder 中,对应着右边的图,将 block 重复堆叠 L 次。Transformer Encoder 有多少个输入就有多少个输出。最后只进行分类,所以将 class 位置对应的输出输入 MLP Head 进行预测分类输出。

2.1 Embedding 层
接下来我们对每个模块进行细讲,首先是 Embedding 层。对于标准的 Transformer 模块,要求的输入是 token 向量的序列,即二维矩阵 [num_token, token_dim]。在具体的代码实现过程中呢,我们实际是通过一个卷积层来实现以 ViT-B/16 为例,使用卷积核大小为 16 × 16 16 \times 16 16×16, stride 为 16,卷积核个数为 768 来实现的,即 [224,224,3] --> [14,14,768] --> [196, 768]。即一共 196 个token,每个 token 向量长度为 768。此外我们还需要加上一个类别的 token,为此我们实际上是初始化了一个可训练的参数 [1, 768],将其与 token 序列进行拼接得到 Cat([1, 768], [196,768]) --> [197, 768]。然后再叠加上位置编码 Position Embedding: [197,768] --> [197, 768]。

我们再详细考虑下 Position Embedding,如果不是用 Position Embedding 得到的结果是 0.61382,使用一维的位置编码得到的结果是 0.64206,明显比不使用位置编码高了三个百分点。使用 2D 以及相对位置编码其实和 1D 差不多啊。论文中也提到说 the difference in how to encoder spatial information is less important,即位置编码的差异其实不是特别重要。1D 的话,简单效果好参数少,所以默认使用 1D 的位置编码。

论文中有给这样一个图,我们训练得到的位置编码与其他位置编码之间的余弦相似度。这里的 patches 大小是 32 × 32 32 \times 32 32×32 的, 224 / 32 = 7 224/32=7 224/32=7,所以这里的大小是 7 × 7 7 \times 7 7×7。这张图怎么理解呢?我们会在每个 token 上叠加一个位置编码,中间那个图的 49 个小图中,每个小图其实也是 7 × 7 7 \times 7 7×7 的。左上角第一行第一个 patch 的位置编码与自己的位置编码是一样的,所以余弦相似度是1,所以左上角是黄色。然后在与其他位置编码进行计算。就得到了左上角的小图。其他的也都是类似的规律。注意,这个是学出来的。

2.2 Transformer Encoder 层
Transformer Encoder 就是将 Encoder Block 重复堆叠 L 次。我们来看看单个 Encoder Block。首先输入一个 Norm 层,这里的 Norm 指的是 Layer Normalization 层(有论文比较了 BN 在 transformer 中为什么不好,不如 LN |这里先 Norm 再 Multihead Attention 也是有论文研究的,原始的 Transformer 先 Attention 再 Norm,此外这个先 Norm 再操作和 DenseNet 的先 BN 再 Conv 异曲同工)。经过 LN 后经过 Multi-Head Attention,然后源码经过 Dropout 层,有些复现大神使用的是 DropPath 方法,根据以往的经验可能使用后者会更好一点。然后残差之后经过 LN,MLP Block,Dropout/DropPath 之后残差即可。
MLP Block 其实也很简单,就是一个全连接,GELU 激活函数,Dropout,全连接,Dropout。需要注意第一个全连接层的节点个数是输入向量长度的 4 倍,第二个全连接层会还原会原来的大小。

有一个地方要注意,看源码才知道,在 Transformer Encoder 前有个 Dropout 层,在之后有一个 Layer Norm 层,这些在图中还没有画出来的。在 Transformer Encoder 前有个 Dropout 层,对此我的理解是在原图上随机加 Mask 遮挡,然后依然要进行分类。
2.3 MLP Head 层
在训练 ImageNet21K 时候是由 Linear + tanh 激活函数 + Linear 构成的。但是迁移到 ImageNet1k 之后或者做迁移学习时,其实只需要一个 Linear 就足够了。(获得类别概率需要一个 softmax)

2.4 ViT B/16
我们来从头梳理一次 ViT B/16 的结构,假设输入图为 224 × 224 × 3 224 \times 224 \times 3 224×224×3,首先经过一个卷积层,然后进行高度和宽度方向的展平处理。紧接着 concat 一个 class token,再加上 Position Embedding 的相加操作,这里的 Position Embedding 也是可训练的参数。经过 Dropout 之后输入 12 个堆叠的 Encoder Block。Encoder 输出经过 LN 得到的输出为 197 × 768 197 \times 768 197×768,即是不变的。然后我们提取第一个 class token 对应的输出,切片之后即变成了 1 × 768 1 \times 768 1×768,将其输入 MLP Head 中。如果在 ImageNet21K 预训练的时候,Pre-Logits 就是一个全连接层,tanh 激活函数。如果是在 ImageNet1k 或者自己的数据集上的时候训练的时候,可以不要这个 Pre-Logits。

2.5 ViT 模型参数
我们来看看论文给出的 ViT 模型的参数。ViT B 对应的就是 ViT-Base,ViT L 对应的是 ViT-Large,ViT H 对应的是 ViT-Huge。patch size 是图片切片大小(源码中还有 32 × 32 32 \times 32 32×32 的);layers 则是 encoder block 堆叠的次数;Hidden size 是 token 向量的长度;MLP size 是 Hidden size 的四倍,即 Encoder block 中 MLP block 第一个全连接层节点个数;Heads 则是 Multi-head Attention 中 heads 的个数。

3. Hybrid 混合模型
我们来看看 CNN 和 Transformer 的混合模型。首先用传统的神经网络 backbone 来提取特征,然后再通过 ViT 模型进一步得到最终的结果。这里的特征提取部分采用的是 ResNet50 网络,但是和原来的有所不同,第一点是采用 stdConv2d,第二点则是使用GN而非BN,第三点是将 stage4 中的 3 个 block 移动到 stage3 中。R50 backbone 的输出为 14 × 14 × 1024 14 \times 14 \times 1024 14×14×1024,然后通过 1 × 1 1 \times 1 1×1 卷积变为 14 × 14 × 768 14 \times 14 \times 768 14×14×768,然后进行展平处理就得到 token 了。之后就是和 ViT 一摸一样的了。

结果可见,混合模型比纯 transformer 模型的效果会好一些,这也是迁移学习之后的结果。在少量微调中混合模型占有,但是随着迭代次数的上升,纯 transformer 也能达到混合模型的效果,例如 14 个 epoches 时 ViT-L/16 和 Res50x1+ViT-L/16 就基本一样了。

4. 代码
代码出处见 此处。
"""
original code from rwightman:
https://github.com/rwightman/pytorch-image-models/blob/master/timm/models/vision_transformer.py
"""
from functools import partial
from collections import OrderedDict
import torch
import torch.nn as nn
def drop_path(x, drop_prob: float = 0., training: bool = False):
"""
Drop paths (Stochastic Depth) per sample (when applied in main path of residual blocks).
This is the same as the DropConnect impl I created for EfficientNet, etc networks, however,
the original name is misleading as 'Drop Connect' is a different form of dropout in a separate paper...
See discussion: https://github.com/tensorflow/tpu/issues/494#issuecomment-532968956 ... I've opted for
changing the layer and argument names to 'drop path' rather than mix DropConnect as a layer name and use
'survival rate' as the argument.
"""
if drop_prob == 0. or not training:
return x
keep_prob = 1 - drop_prob
shape = (x.shape[0],) + (1,) * (x.ndim - 1) # work with diff dim tensors, not just 2D ConvNets
random_tensor = keep_prob + torch.rand(shape, dtype=x.dtype, device=x.device)
random_tensor.floor_() # binarize
output = x.div(keep_prob) * random_tensor
return output
class DropPath(nn.Module):
"""
Drop paths (Stochastic Depth) per sample (when applied in main path of residual blocks).
"""
def __init__(self, drop_prob=None):
super(DropPath, self).__init__()
self.drop_prob = drop_prob
def forward(self, x):
return drop_path(x, self.drop_prob, self.training)
class PatchEmbed(nn.Module):
"""
2D Image to Patch Embedding
"""
def __init__(self, img_size=224, patch_size=16, in_c=3, embed_dim=768, norm_layer=None):
super().__init__()
img_size = (img_size, img_size)
patch_size = (patch_size, patch_size)
self.img_size = img_size
self.patch_size = patch_size
self.grid_size = (img_size[0] // patch_size[0], img_size[1] // patch_size[1])
self.num_patches = self.grid_size[0] * self.grid_size[1]
self.proj = nn.Conv2d(in_c, embed_dim, kernel_size=patch_size, stride=patch_size)
self.norm = norm_layer(embed_dim) if norm_layer else nn.Identity()
def forward(self, x):
B, C, H, W = x.shape
assert H == self.img_size[0] and W == self.img_size[1], \
f"Input image size ({H}*{W}) doesn't match model ({self.img_size[0]}*{self.img_size[1]})."
# flatten: [B, C, H, W] -> [B, C, HW]
# transpose: [B, C, HW] -> [B, HW, C]
x = self.proj(x).flatten(2).transpose(1, 2)
x = self.norm(x)
return x
class Attention(nn.Module):
def __init__(self,
dim, # 输入token的dim
num_heads=8,
qkv_bias=False,
qk_scale=None,
attn_drop_ratio=0.,
proj_drop_ratio=0.):
super(Attention, self).__init__()
self.num_heads = num_heads
head_dim = dim // num_heads
self.scale = qk_scale or head_dim ** -0.5
self.qkv = nn.Linear(dim, dim * 3, bias=qkv_bias)
self.attn_drop = nn.Dropout(attn_drop_ratio)
self.proj = nn.Linear(dim, dim)
self.proj_drop = nn.Dropout(proj_drop_ratio)
def forward(self, x):
# [batch_size, num_patches + 1, total_embed_dim]
B, N, C = x.shape
# qkv(): -> [batch_size, num_patches + 1, 3 * total_embed_dim]
# reshape: -> [batch_size, num_patches + 1, 3, num_heads, embed_dim_per_head]
# permute: -> [3, batch_size, num_heads, num_patches + 1, embed_dim_per_head]
qkv = self.qkv(x).reshape(B, N, 3, self.num_heads, C // self.num_heads).permute(2, 0, 3, 1, 4)
# [batch_size, num_heads, num_patches + 1, embed_dim_per_head]
q, k, v = qkv[0], qkv[1], qkv[2] # make torchscript happy (cannot use tensor as tuple)
# transpose: -> [batch_size, num_heads, embed_dim_per_head, num_patches + 1]
# @: multiply -> [batch_size, num_heads, num_patches + 1, num_patches + 1]
attn = (q @ k.transpose(-2, -1)) * self.scale
attn = attn.softmax(dim=-1)
attn = self.attn_drop(attn)
# @: multiply -> [batch_size, num_heads, num_patches + 1, embed_dim_per_head]
# transpose: -> [batch_size, num_patches + 1, num_heads, embed_dim_per_head]
# reshape: -> [batch_size, num_patches + 1, total_embed_dim]
x = (attn @ v).transpose(1, 2).reshape(B, N, C)
x = self.proj(x)
x = self.proj_drop(x)
return x
class Mlp(nn.Module):
"""
MLP as used in Vision Transformer, MLP-Mixer and related networks
"""
def __init__(self, in_features, hidden_features=None, out_features=None, act_layer=nn.GELU, drop=0.):
super().__init__()
out_features = out_features or in_features
hidden_features = hidden_features or in_features
self.fc1 = nn.Linear(in_features, hidden_features)
self.act = act_layer()
self.fc2 = nn.Linear(hidden_features, out_features)
self.drop = nn.Dropout(drop)
def forward(self, x):
x = self.fc1(x)
x = self.act(x)
x = self.drop(x)
x = self.fc2(x)
x = self.drop(x)
return x
class Block(nn.Module):
def __init__(self,
dim,
num_heads,
mlp_ratio=4.,
qkv_bias=False,
qk_scale=None,
drop_ratio=0.,
attn_drop_ratio=0.,
drop_path_ratio=0.,
act_layer=nn.GELU,
norm_layer=nn.LayerNorm):
super(Block, self).__init__()
self.norm1 = norm_layer(dim)
self.attn = Attention(dim, num_heads=num_heads, qkv_bias=qkv_bias, qk_scale=qk_scale,
attn_drop_ratio=attn_drop_ratio, proj_drop_ratio=drop_ratio)
# NOTE: drop path for stochastic depth, we shall see if this is better than dropout here
self.drop_path = DropPath(drop_path_ratio) if drop_path_ratio > 0. else nn.Identity()
self.norm2 = norm_layer(dim)
mlp_hidden_dim = int(dim * mlp_ratio)
self.mlp = Mlp(in_features=dim, hidden_features=mlp_hidden_dim, act_layer=act_layer, drop=drop_ratio)
def forward(self, x):
x = x + self.drop_path(self.attn(self.norm1(x)))
x = x + self.drop_path(self.mlp(self.norm2(x)))
return x
class VisionTransformer(nn.Module):
def __init__(self, img_size=224, patch_size=16, in_c=3, num_classes=1000,
embed_dim=768, depth=12, num_heads=12, mlp_ratio=4.0, qkv_bias=True,
qk_scale=None, representation_size=None, distilled=False, drop_ratio=0.,
attn_drop_ratio=0., drop_path_ratio=0., embed_layer=PatchEmbed, norm_layer=None,
act_layer=None):
"""
Args:
img_size (int, tuple): input image size
patch_size (int, tuple): patch size
in_c (int): number of input channels
num_classes (int): number of classes for classification head
embed_dim (int): embedding dimension
depth (int): depth of transformer
num_heads (int): number of attention heads
mlp_ratio (int): ratio of mlp hidden dim to embedding dim
qkv_bias (bool): enable bias for qkv if True
qk_scale (float): override default qk scale of head_dim ** -0.5 if set
representation_size (Optional[int]): enable and set representation layer (pre-logits) to this value if set
distilled (bool): model includes a distillation token and head as in DeiT models
drop_ratio (float): dropout rate
attn_drop_ratio (float): attention dropout rate
drop_path_ratio (float): stochastic depth rate
embed_layer (nn.Module): patch embedding layer
norm_layer: (nn.Module): normalization layer
"""
super(VisionTransformer, self).__init__()
self.num_classes = num_classes
self.num_features = self.embed_dim = embed_dim # num_features for consistency with other models
self.num_tokens = 2 if distilled else 1
norm_layer = norm_layer or partial(nn.LayerNorm, eps=1e-6)
act_layer = act_layer or nn.GELU
self.patch_embed = embed_layer(img_size=img_size, patch_size=patch_size, in_c=in_c, embed_dim=embed_dim)
num_patches = self.patch_embed.num_patches
self.cls_token = nn.Parameter(torch.zeros(1, 1, embed_dim))
self.dist_token = nn.Parameter(torch.zeros(1, 1, embed_dim)) if distilled else None
self.pos_embed = nn.Parameter(torch.zeros(1, num_patches + self.num_tokens, embed_dim))
self.pos_drop = nn.Dropout(p=drop_ratio)
dpr = [x.item() for x in torch.linspace(0, drop_path_ratio, depth)] # stochastic depth decay rule
self.blocks = nn.Sequential(*[
Block(dim=embed_dim, num_heads=num_heads, mlp_ratio=mlp_ratio, qkv_bias=qkv_bias, qk_scale=qk_scale,
drop_ratio=drop_ratio, attn_drop_ratio=attn_drop_ratio, drop_path_ratio=dpr[i],
norm_layer=norm_layer, act_layer=act_layer)
for i in range(depth)
])
self.norm = norm_layer(embed_dim)
# Representation layer
if representation_size and not distilled:
self.has_logits = True
self.num_features = representation_size
self.pre_logits = nn.Sequential(OrderedDict([
("fc", nn.Linear(embed_dim, representation_size)),
("act", nn.Tanh())
]))
else:
self.has_logits = False
self.pre_logits = nn.Identity()
# Classifier head(s)
self.head = nn.Linear(self.num_features, num_classes) if num_classes > 0 else nn.Identity()
self.head_dist = None
if distilled:
self.head_dist = nn.Linear(self.embed_dim, self.num_classes) if num_classes > 0 else nn.Identity()
# Weight init
nn.init.trunc_normal_(self.pos_embed, std=0.02)
if self.dist_token is not None:
nn.init.trunc_normal_(self.dist_token, std=0.02)
nn.init.trunc_normal_(self.cls_token, std=0.02)
self.apply(_init_vit_weights)
def forward_features(self, x):
# [B, C, H, W] -> [B, num_patches, embed_dim]
x = self.patch_embed(x) # [B, 196, 768]
# [1, 1, 768] -> [B, 1, 768]
cls_token = self.cls_token.expand(x.shape[0], -1, -1)
if self.dist_token is None:
x = torch.cat((cls_token, x), dim=1) # [B, 197, 768]
else:
x = torch.cat((cls_token, self.dist_token.expand(x.shape[0], -1, -1), x), dim=1)
x = self.pos_drop(x + self.pos_embed)
x = self.blocks(x)
x = self.norm(x)
if self.dist_token is None:
return self.pre_logits(x[:, 0])
else:
return x[:, 0], x[:, 1]
def forward(self, x):
x = self.forward_features(x)
if self.head_dist is not None:
x, x_dist = self.head(x[0]), self.head_dist(x[1])
if self.training and not torch.jit.is_scripting():
# during inference, return the average of both classifier predictions
return x, x_dist
else:
return (x + x_dist) / 2
else:
x = self.head(x)
return x
def _init_vit_weights(m):
"""
ViT weight initialization
:param m: module
"""
if isinstance(m, nn.Linear):
nn.init.trunc_normal_(m.weight, std=.01)
if m.bias is not None:
nn.init.zeros_(m.bias)
elif isinstance(m, nn.Conv2d):
nn.init.kaiming_normal_(m.weight, mode="fan_out")
if m.bias is not None:
nn.init.zeros_(m.bias)
elif isinstance(m, nn.LayerNorm):
nn.init.zeros_(m.bias)
nn.init.ones_(m.weight)
def vit_base_patch16_224_in21k(num_classes: int = 21843, has_logits: bool = True):
"""
ViT-Base model (ViT-B/16) from original paper (https://arxiv.org/abs/2010.11929).
ImageNet-21k weights @ 224x224, source https://github.com/google-research/vision_transformer.
weights ported from official Google JAX impl:
https://github.com/rwightman/pytorch-image-models/releases/download/v0.1-vitjx/jx_vit_base_patch16_224_in21k-e5005f0a.pth
"""
model = VisionTransformer(img_size=224,
patch_size=16,
embed_dim=768,
depth=12,
num_heads=12,
representation_size=768 if has_logits else None,
num_classes=num_classes)
return model
def vit_base_patch32_224_in21k(num_classes: int = 21843, has_logits: bool = True):
"""
ViT-Base model (ViT-B/32) from original paper (https://arxiv.org/abs/2010.11929).
ImageNet-21k weights @ 224x224, source https://github.com/google-research/vision_transformer.
weights ported from official Google JAX impl:
https://github.com/rwightman/pytorch-image-models/releases/download/v0.1-vitjx/jx_vit_base_patch32_224_in21k-8db57226.pth
"""
model = VisionTransformer(img_size=224,
patch_size=32,
embed_dim=768,
depth=12,
num_heads=12,
representation_size=768 if has_logits else None,
num_classes=num_classes)
return model
def vit_large_patch16_224_in21k(num_classes: int = 21843, has_logits: bool = True):
"""
ViT-Large model (ViT-L/16) from original paper (https://arxiv.org/abs/2010.11929).
ImageNet-21k weights @ 224x224, source https://github.com/google-research/vision_transformer.
weights ported from official Google JAX impl:
https://github.com/rwightman/pytorch-image-models/releases/download/v0.1-vitjx/jx_vit_large_patch16_224_in21k-606da67d.pth
"""
model = VisionTransformer(img_size=224,
patch_size=16,
embed_dim=1024,
depth=24,
num_heads=16,
representation_size=1024 if has_logits else None,
num_classes=num_classes)
return model
def vit_large_patch32_224_in21k(num_classes: int = 21843, has_logits: bool = True):
"""
ViT-Large model (ViT-L/32) from original paper (https://arxiv.org/abs/2010.11929).
ImageNet-21k weights @ 224x224, source https://github.com/google-research/vision_transformer.
weights ported from official Google JAX impl:
https://github.com/rwightman/pytorch-image-models/releases/download/v0.1-vitjx/jx_vit_large_patch32_224_in21k-9046d2e7.pth
"""
model = VisionTransformer(img_size=224,
patch_size=32,
embed_dim=1024,
depth=24,
num_heads=16,
representation_size=1024 if has_logits else None,
num_classes=num_classes)
return model
def vit_huge_patch14_224_in21k(num_classes: int = 21843, has_logits: bool = True):
"""
ViT-Huge model (ViT-H/14) from original paper (https://arxiv.org/abs/2010.11929).
ImageNet-21k weights @ 224x224, source https://github.com/google-research/vision_transformer.
NOTE: converted weights not currently available, too large for github release hosting.
"""
model = VisionTransformer(img_size=224,
patch_size=14,
embed_dim=1280,
depth=32,
num_heads=16,
representation_size=1280 if has_logits else None,
num_classes=num_classes)
return model

旨在为数千万中国开发者提供一个无缝且高效的云端环境,以支持学习、使用和贡献开源项目。
更多推荐
 67
67 0
0- 0



 已为社区贡献6条内容
已为社区贡献6条内容

所有评论(0)