
OpenGL学习:模型加载-obj模型和AssImp模型
前面介绍了光照基础内容,以及材质和lighting maps,和光源类型,我们对使用光照增强场景真实感有了一定了解。但是到目前为止,我们通过在程序中指定的立方体数据,绘制立方体,看起来还是很乏味。本节开始介绍模型加载,通过加载丰富的模型,能够丰富我们的场景,变得好玩。本节的示例代码均可以在我的github下载。
加载模型可以使用比较好的库,例如obj模型加载的库,Assimp加载库。本节作为入门篇,我们一开始不使用这些库加载很酷的模型,而是熟悉下模型以及模型加载的概念,然后我们封装一个简单的obj模型加载类,加载一个简单的立方体模型。 之后我们会使用Assimp库会加载一个酷炫的3d模型,但是首先还是注重多感受下模型加载的基础
通过本节可以了解到
- Mesh的概念
- Obj模型数据格式
- Obj模型简单的加载类和加载实验
- AssImp模型加载实验
模型的表达
在3d图形处理中,一个模型(model)通常由一个或者多个Mesh(网格)组成,一个Mesh是可绘制的独立实体。例如复杂的人物模型,可以分别划分为头部,四肢,服饰,武器等各个部分来建模,这些Mesh组合在一起最终形成人物模型。
Mesh由顶点、边、面Faces组成的,它包含绘制所需的数据,例如顶点位置、纹理坐标、法向量,材质属性等内容,它是OpenGL用来绘制的最小实体。Mesh的概念示意如下图所示(来自:What is a mesh in OpenGL?):
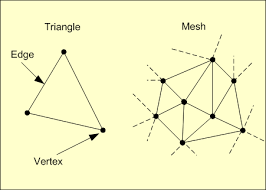
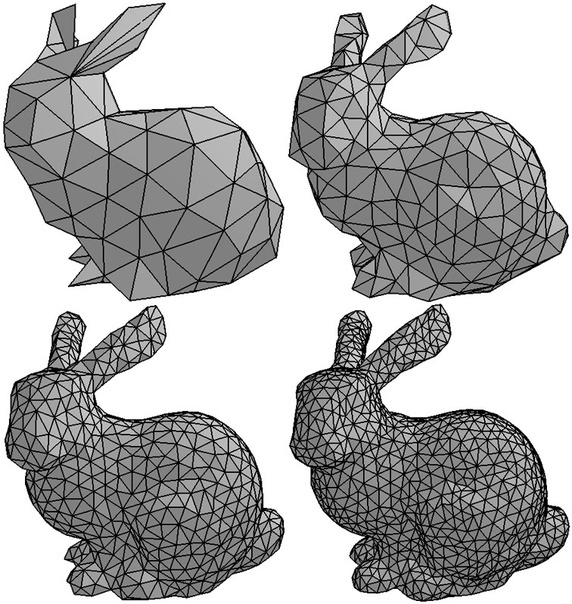
Mesh可以包含多个Face,一个Face是Mesh中一个可绘制的基本图元,例如三角形,多边形,点。要想模型更加逼真,一般需要增加更多图元使Mesh更加精细,当然这也会受到硬件处理能力的限制,例如PC游戏的处理能力要强于移动设备。由于多边形都可以划分为三角形,而三角形是图形处理器中都支持的基本图元,因此使用得较多的就是三角形网格来建模。例如下面的图(来自:What is a mesh in OpenGL?)表达了使用越来越复杂的Mesh建模一只兔子的过程:
随着增加三角形个数,兔子模型变得越来越真实。
目前模型存储的格式很丰富,比较常用的,例如Wavefront .obj file,COLLADA等,要了解各个格式的特点,可以参考wiki 3D graphics file formats。在众多的格式中以obj格式比较通用,它内部是以文本形式表达的,接下来我们通过熟悉下obj格式,了解模型是如何定义的,以及如何加载到OpenGL中来渲染模型。
Obj模型数据格式
obj模型内部以文本存储,例如从Model loading处获取的一个立方体模型cube.obj的数据如下:
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
对这个文本格式做一个简要说明:
- usemtl和mtllib表示的材质相关数据,解析材质数据稍微繁琐,本节我们只是为了说明加载模型的原理,不做讨论。
- o 引入一个新的object
- v 表示顶点位置
- vt 表示顶点纹理坐标
- vn 表示顶点法向量
- f 表示一个面,面使用1/2/8这样格式,表示顶点位置/纹理坐标/法向量的索引,这里索引的是前面用v,vt,vn定义的数据 注意这里Obj的索引是从1开始的,而不是0
模型一般通过3d建模软件,例如Blender, 3DS Max 或者 Maya等工具建模,导出时的数据格式变化较大,:将一种模型数据文件表示的模型,转换为OpenGL可以利用的数据。例如上面的Obj文件中,我们需要解析顶点位置,纹理坐标等数据,构成OpenGL可以渲染的Mesh对象。
从Obj到OpenGL可以理解的Mesh
上面说明了Obj的数据格式,那么在OpenGL中我们怎么表达Mesh呢?首先定义顶点属性数据如下所示:
- 1
- 2
- 3
- 4
- 5
- 6
- 7
Mesh中包含顶点属性,纹理对象等信息,本节我们定义Mesh数据结构如下所示:
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
载入obj模型的过程,就是读取obj文件,并转换为上面Mesh对象的过程。这个过程的思路大致是这样的,读取文件的每一行,根据行首部的指示,确定数据类型,然后加载到mesh的vertData里面去,这个框架是这样:
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
上面提供了一个读取obj文件格式的框架,例如解析纹理坐标数据如下:
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
其余的也类似处理。读取到数据后,在Mesh对象里面需要向前面绘制物体时一样建立缓冲数据,如下:
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
建立缓冲区的同时,本节我们使用的立方体模型cube.dds纹理如下图所示:
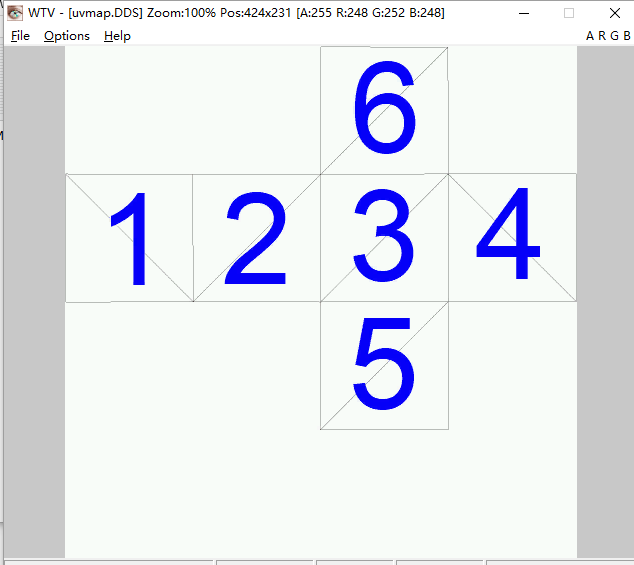
这与以前使用的png纹理不一样,这里我用C++重新改编了Model loading处的加载dds纹理的函数,加载纹理不是本节的重点,具体可以查看github代码。加载纹理后,可以渲染这个obj表达的立方体模型,整个过程如下:
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
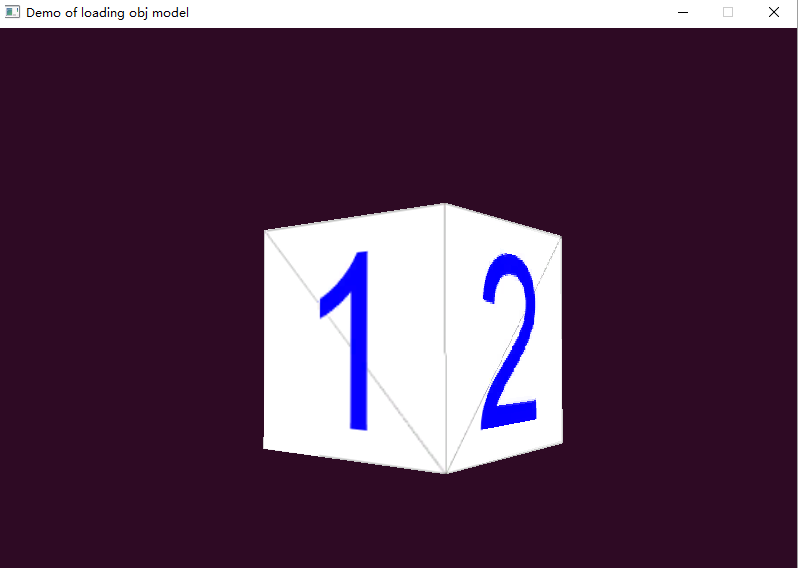
这里我们可以看到,与以往在程序中通过数值指定立方体模型相比,我们的代码更简洁,后面介绍使用Assimp加载库后,可以加载更多丰富的模型,当然要比这个立方体好看。但是本节还是看一下最终立方体的效果吧,如下:
说明
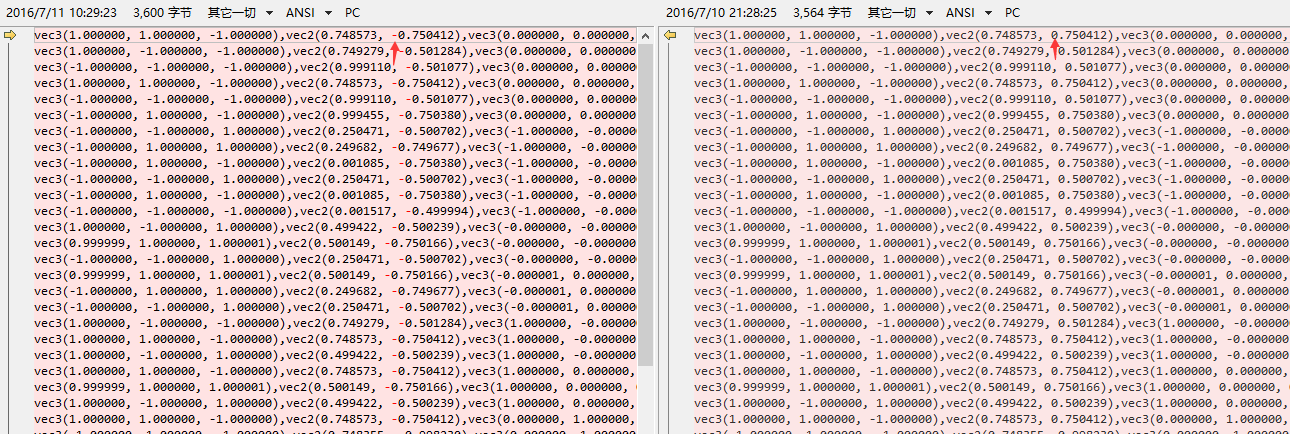
在使用dds纹理的时候,要注意纹理的y轴相对于OpenGL是进行反转的,因此需要使用( coord.u, 1.0-coord.v) 来访问,这可以在加载obj时做,也可以在着色器里面做。没有使用反转的v坐标将导致,无法正常渲染,这也是困住我的一个地方。后来使用数据比对格式发现了这个错误,如下图,左边是反转了的数据,右边是未反转的数据:
在使用blender软件导出模型时,即使勾选了includ UVs,输出时仍然没有纹理坐标,这是因为除了勾选这些选项外,还需要一个uv map操作,关于这一点也是容易产生错误的,详细可以参考Add UV Mapped texture coordinates to OBJ file?。uv mappring这个操作的过程比较繁琐,就不再这里介绍了,感兴趣地可以参考UV Mapping a Mesh
最后本节的加载obj程序只是一个示例,并没有解析材质mtl部分。当没有使用纹理数据绘制经典的Suzanne 模型如下图所示:

这里缺少了纹理和光照,所以模型看起来不真实,下面节介绍使用Assimp加载库时将会改善这一点。
下载和安装AssImp
AssImp是一个模型加载库,它将不同格式的模型数据转换为统一的抽象的数据类型,因而支持较多的模型文件格式。下载和编译这个库的过程,你可以参考官方文档。在linux下可以直接apt-get安装: apt-get install libassimp-dev。
OpenGL需要的数据结构
加载模型的任务就是将抽象的模型数据转换为OpenGL可以处理的VBO,EBO,纹理数据。在程序内部我们定义了Mesh,Model结构来作为内部格式。Mesh表达是绘制的最小实体,它包含顶点属性数据、材质数据;Model则是包含1个或者多个Mesh的模型。定义Mesh结构如下:
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
为了简化程序,这里我们只处理了材质中的纹理数据。Model则是一个包含多个Mesh的类,定义如下:
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
需要注意的是模型文件所在文件路径我们通过modelFileDir保存起来,因为模型中纹理数据可能使用相对路径来表示纹理,通过modelFileDir加上这个相对路径才能找到纹理图片的正确路径。
AssImp加载模型
加载模型时首先创建 Assimp::Importer的示例,然后通过它的l Assimp::Importer::ReadFile()方法加载模型,如下所示:
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
ReadFile函数中第二个参数就是后处理选项,它是一个枚举类型aiPostProcessSteps,可以使用位或操作包含多个选项,例如选项aiProcess_MakeLeftHanded表示将默认的右手系坐标数据转换为左手系坐标数据,aiProcess_Triangulate选项将索引数据多余3个的多边形划分为多个三角形,方便我们使用三角形进行绘制。完整的后处理选项列表,可以参考官方文档。
通过上面的加载我们获取到了模型的根结构数据aiScene,接下来的工作就是:从aiScene获取OpenGL所需要的VBO,EBO,纹理数据。
AssImp中数据通过aiNode组织父子结点,包含了层次信息,我们可以忽略这些信息,直接读取所有我们需要的VBO,EBO,纹理数据,但是这种父子结构信息在后面制作骨骼动画时会再次用到,因此这里还是按照层次的方式来解析aiScene数据。
所谓结点就是包含一个多个Mesh的部位,例如一个人物角色,可能包含头部,颈部,手臂,胸部等多个结点,每个结点也可以包含更多的细化结点。解析aiScene这种父子结点的层次数据,直观的方法就是使用递归,递归就是一个函数直接调用自己,一层一层调用下去,当遇到一个合适条件时终止调用,函数一层层返回。从aiScene解析模型数据获取OpenGL所需数据的框架大概是这样的:
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
上面的框架给出了从aiScene获取数据,建立内部格式Model和Mesh的思路,具体实现细节可以参考程序源码。
加载纳米战斗服模型
到这里,我们可以来欣赏酷炫的模型了,首先加载一个从learnopengl获取的纳米战斗服模型nanosuit,效果如下图左所示:
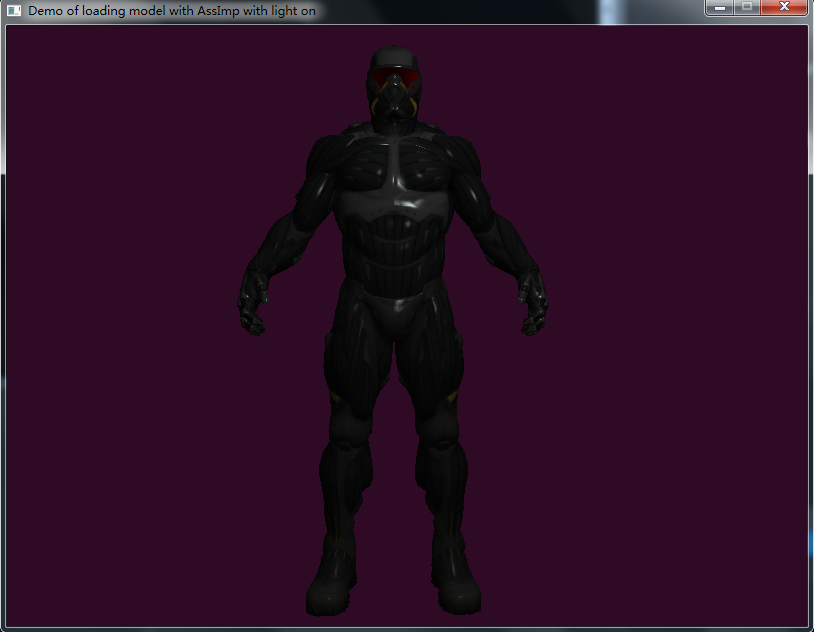
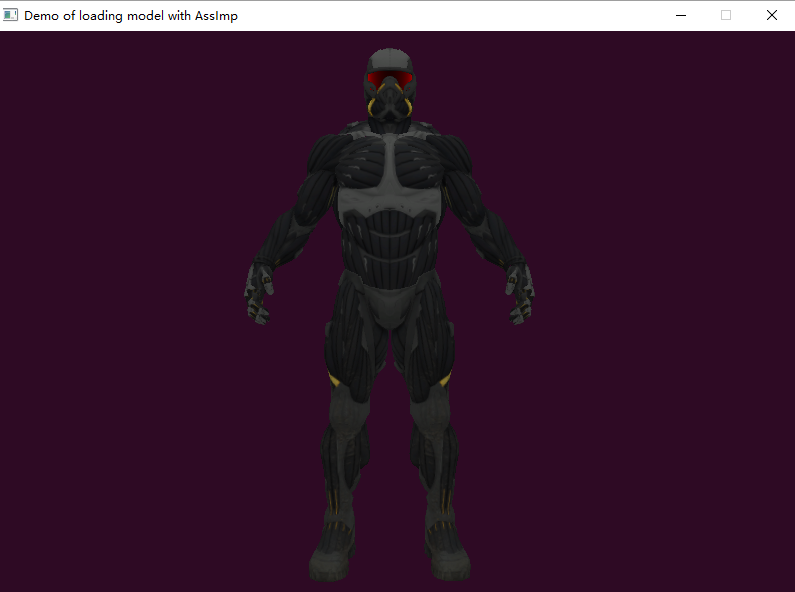
这里没有使用光照,上图右是实现了一个点光源的效果. 可以从机器人胸部的高光部分看到,实现光照时的区别。
加载模型需要注意的地方
1.加载模型后,需要适当设置模型变换矩阵,否则模型显示在奇怪的位置。这个模型变换矩阵,目前还没找到合适的方法从模型数据中获取。
2.下载的模型,有些路径是不正确的,本文统一采用绝对路径方式。路径不正确或者文件缺失时的错误提示
3.部分纹理图片的格式,模型的格式目前并未处理,不支持加载。
还需要改进的地方
上面加载的模型,已经让人很兴奋了,但是还不够真实,高效。在实验过程中,思考还需要通过以下方面进行改进:
1.我们这里的材质只处理了纹理部分,实际上模型中如果没有通过纹理定义材质,还需要获取ambient等颜色表示的材质。而且纹理可能不止一个,本文目前只处理了一个纹理(主要原因是下载的素材里面没有找不到更多的纹理坐标)。可以通过定义下面的材质结构体,并处理这个材质数据来丰富场景:
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
2.模型中要通过光源和相机加以改善。目前在模型中通过以下方式:
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
获取光源数据时,大量从网络上下载的模型中并没有找到光源数据,比较可惜。
3.实际模型的材质中包含了map_Bump数据,但目前还未学习处理方法。
4.目前通过Model加载模型时耗时非常多,效率不高,需要进一步提高模型加载和渲染的速度

旨在为数千万中国开发者提供一个无缝且高效的云端环境,以支持学习、使用和贡献开源项目。
更多推荐



 2
2 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)